
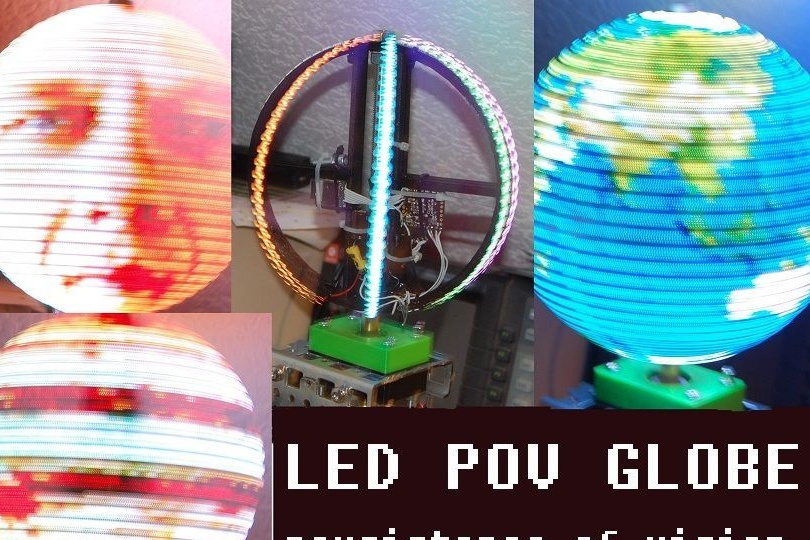
บทช่วยสอนนี้เกี่ยวกับวิธีสร้างลูกโลกแบบ POV ด้วยค่าที่น้อยลง อิเล็กทรอนิกส์ ส่วนประกอบกว่าอุปกรณ์อื่นที่คล้ายคลึงกัน ด้วยการใช้ไฟ LED RGB พร้อมคอนโทรลเลอร์ APA102 ในตัว สิ่งนี้จะช่วยให้คุณประหยัดการบัดกรีของสายไฟจำนวนมาก คุณสามารถอ่านเพิ่มเติมเกี่ยวกับพวกเขา ไฟ LED เหล่านี้ไม่ต้องการไดรเวอร์เพิ่มเติม พวกเขาเชื่อมต่อโดยตรงกับไมโครคอนโทรลเลอร์ในสองวิธี วิธีนี้ช่วยให้คุณสามารถสลับไฟ LED อย่างรวดเร็ว เพื่อให้ได้ภาพที่เสถียรการซิงโครไนซ์ SPI นั้นมาที่ความถี่ 10 MHz ข้อดีอีกอย่างของการออกแบบนี้คือการใช้แฟลชการ์ดซึ่งเก็บภาพในรูปแบบ BMP
1 วัสดุที่ต้องการ

สำหรับแกนโลกคุณจะต้อง:

1. สลักเกลียวด้วยด้าย M8 และความยาว 250 มม
2. อ่อนนุช M8
3. ปลอกทองเหลือง 10 มม. และยาว 100 มม
4. เครื่องซักผ้าพลาสติก 8 มม. 2 ชิ้น (รวมไฟล์ STL)
5. คัปปลิ้งสำหรับผู้ที่จะใช้สเต็ปปิ้งมอเตอร์ NEMA 17
ในการจ่ายไฟวงแหวน LED บนเพลาคุณจำเป็นต้องใช้
1. ball bearing 6300 (10x35x11)
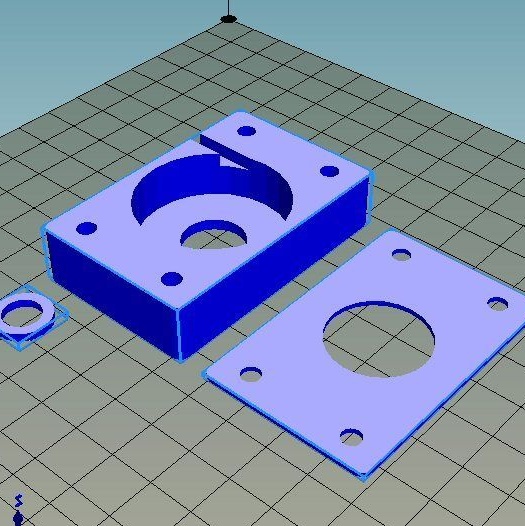
2. สองวงเล็บสำหรับแบริ่ง พิมพ์บนเครื่องพิมพ์ 3 มิติหรือทำจากไม้
3. สลักเกลียว M4x40 สี่อันพร้อมน็อต
4. เคล็ดลับในสาย 2 ชิ้น 8 มม
5. ด้วยเส้นผ่าศูนย์กลางเพลาของ 5mm
6. 4 น็อต M4 สำหรับติดตั้งเครื่องยนต์
7. อาจเป็นแฟนของมัน
หรือคุณสามารถใช้เครื่องยนต์ใดก็ได้ที่มีแรงบิดและการควบคุมความเร็วที่ถูกต้อง มอเตอร์ที่ใช้ในการออกแบบนี้มีแรงบิดสูงสุดที่ปัจจุบัน 50A แต่การสิ้นเปลืองกระแสไฟฟ้าสูงสุดระหว่างการใช้งานเพียง 18A
เพื่อควบคุมไดรเวอร์เซอร์โวมอเตอร์ให้ใช้
1.
2. ปุ่มสองปุ่ม
แหล่งจ่ายไฟ 12V สำหรับมอเตอร์และ 5V สำหรับไฟ LED ในฐานะที่เป็นแหล่งจ่ายไฟคุณสามารถใช้หน่วยเก่าจากพีซี คุณสามารถซื้อแหล่งจ่ายไฟ 12v / 5A และเชื่อมต่อกับมัน
สำหรับวงแหวน LED คุณจะต้อง:
1.664 ไฟ LED 2 แถบจาก 32 ชิ้น
2. ตัวเก็บประจุ 1000µF 10V
3. เซ็นเซอร์ฮอลล์และแม่เหล็ก
4. ตัวต้านทานแบบดึงขึ้น 1k, 10k
5. ต้องพิมพ์วงแหวนบนเครื่องพิมพ์ 3D หรือใช้ชิ้นส่วนท่อพีวีซี
6. ความสัมพันธ์พลาสติก (100 มม.)
7. กาวที่ดีที่เกาะติดกันไม่หลุดที่ 2,500 รอบต่อนาที
คุณจะต้องมีไมโครคอนโทรลเลอร์ Parallax Propeller ด้วย หรือคุณสามารถใช้อีก รูปแบบ ควบคุม แต่ยังใช้ค่าธรรมเนียมสำหรับ คอนโทรลเลอร์นี้ตั้งโปรแกรมและใช้งานง่ายเหมือน Arduino. คุณจะต้องใช้อะแดปเตอร์ USB-TTL เพื่อตั้งโปรแกรมคอนโทรลเลอร์ทั้งสอง
การเคหะ
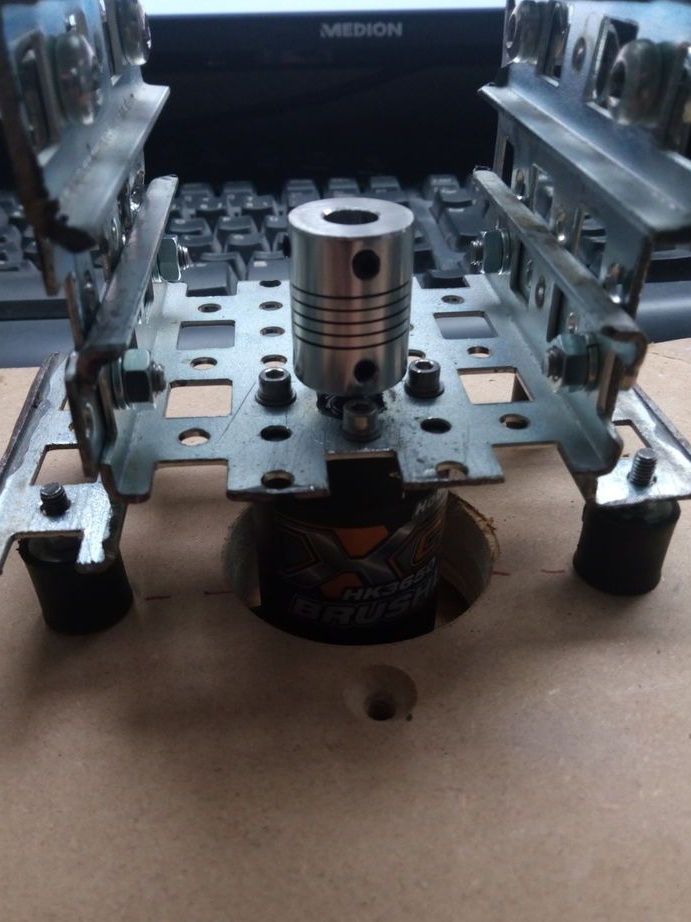
ที่อยู่อาศัยสำหรับ ทำที่บ้าน คุณสามารถใช้เวลาใด ๆ ที่ยากพอ สิ่งที่สำคัญที่สุดคือคุณสามารถยึดเครื่องยนต์และตลับลูกปืนได้อย่างปลอดภัย
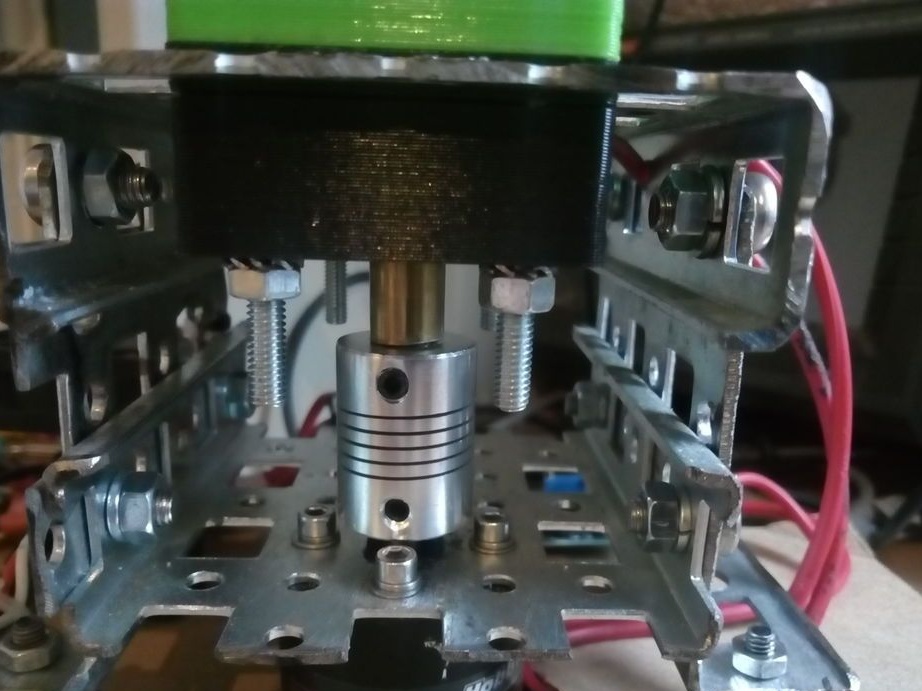
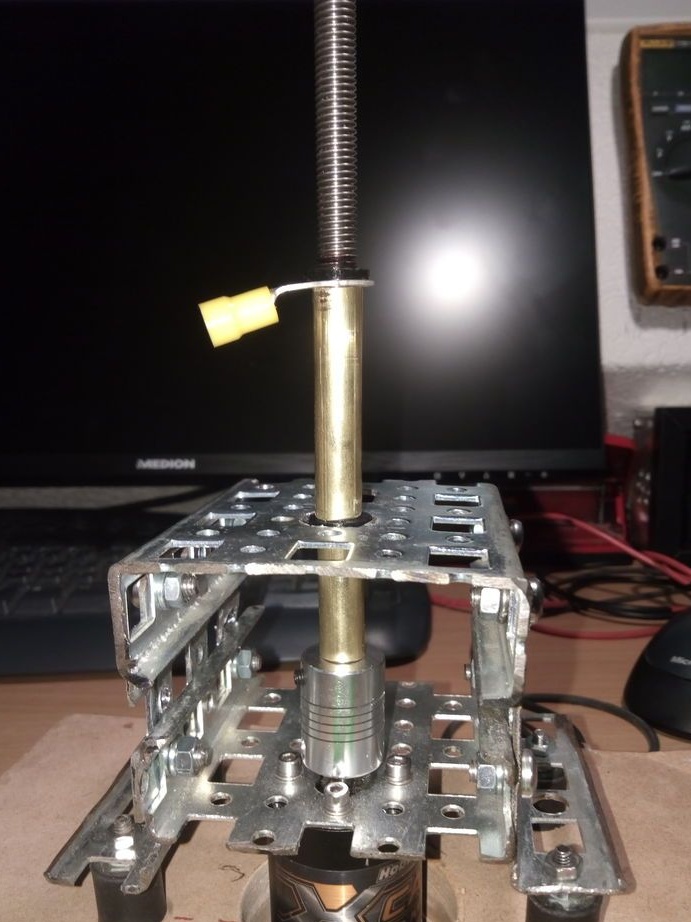
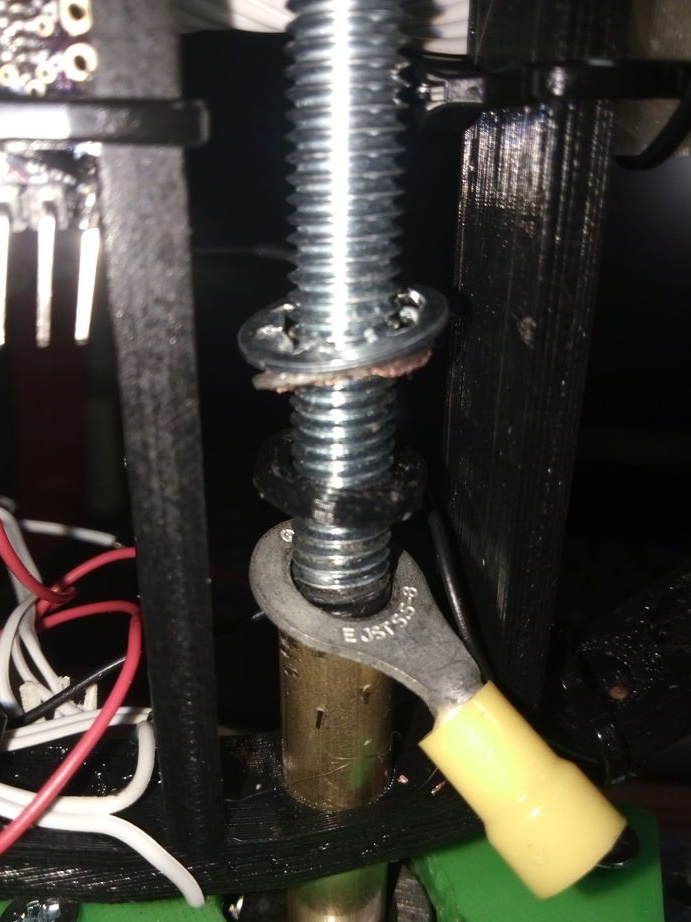
แกนยาว 250 มม. ใช้สำหรับเพลาขับความยาวของบุชทองเหลืองคือ 50 และ 30 มม. ขึ้นอยู่กับขนาดแหวนและความยาวเพลา แขนเสื้อด้านบนและอีกต่อไปจะต้องแยกออกจากสตั๊ดเพราะมันถูกใช้เพื่อจ่ายกำลังไฟให้กับ LED เมื่อต้องการทำเช่นนี้ให้พันเทปไฟฟ้าไว้บนกิ๊บหรือใช้การหดตัวด้วยความร้อนจำเป็นต้องใช้แหวนพลาสติกสองอัน ปลอกแขนจะต้องเจาะถึง 8.5-9 มม. มิฉะนั้นจะไม่พอดี แขนอีกข้างรวมกับแกนทำให้เกิดการสัมผัสเชิงลบ
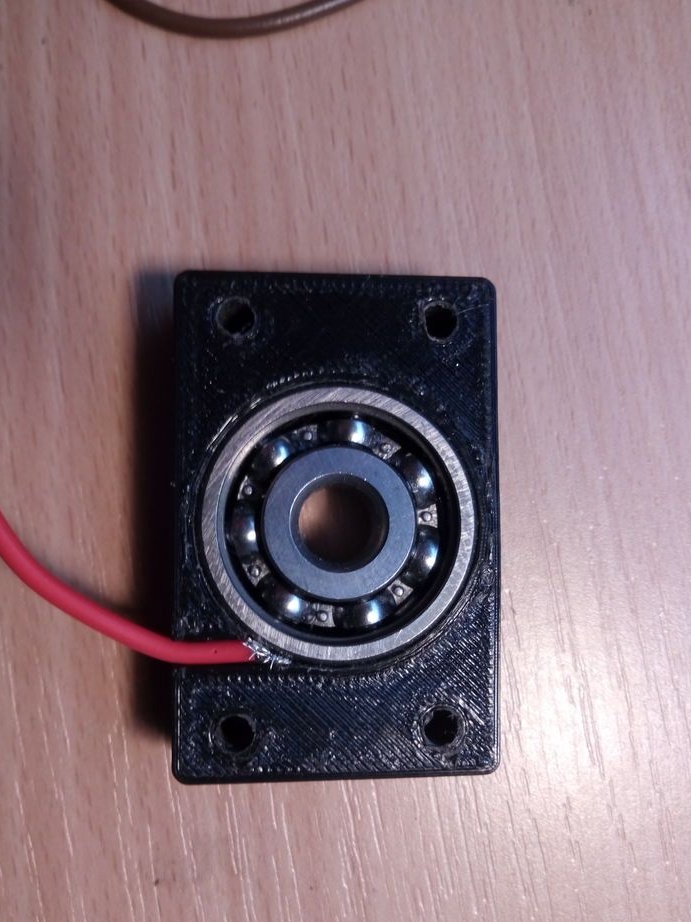
กำลังไฟฟ้าลบจะถูกวางในร่องพิเศษและกดให้เข้ากับตลับลูกปืนในตัวยึดซึ่งสามารถพิมพ์ลงบนเครื่องพิมพ์ได้ ไฟล์ Bracket STL ในไฟล์เก็บถาวร


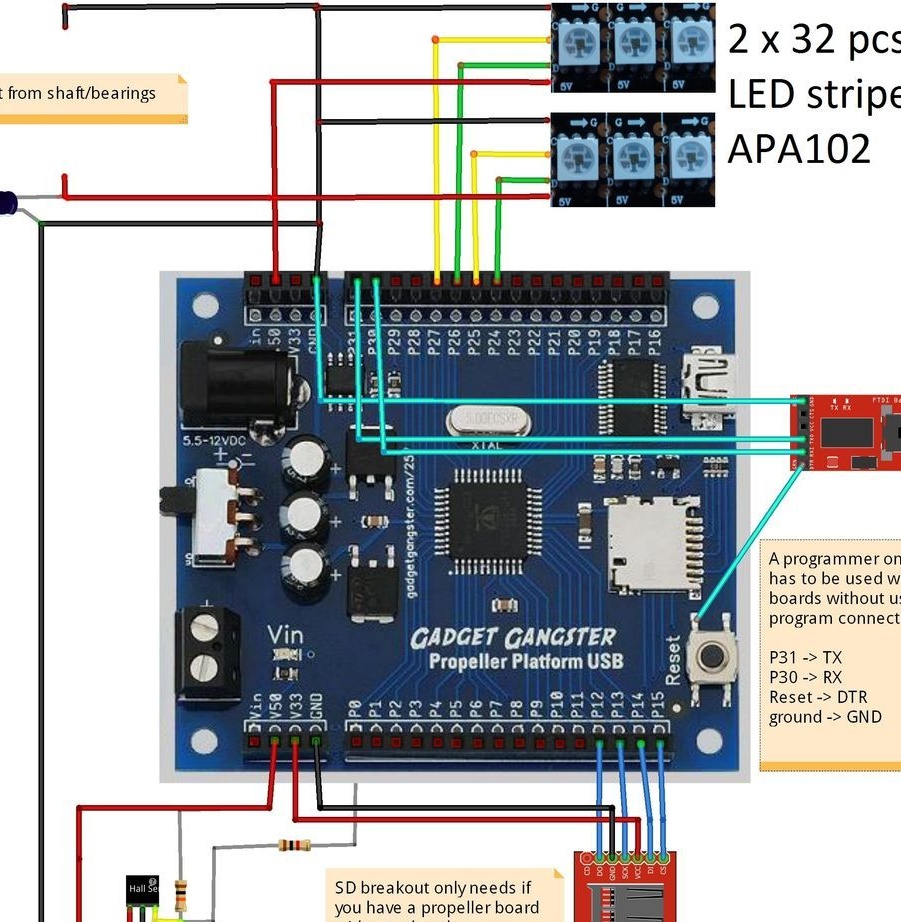
ตอนนี้คุณต้องเชื่อมต่อมอเตอร์ไฟฟ้าดังแสดงในแผนภาพ
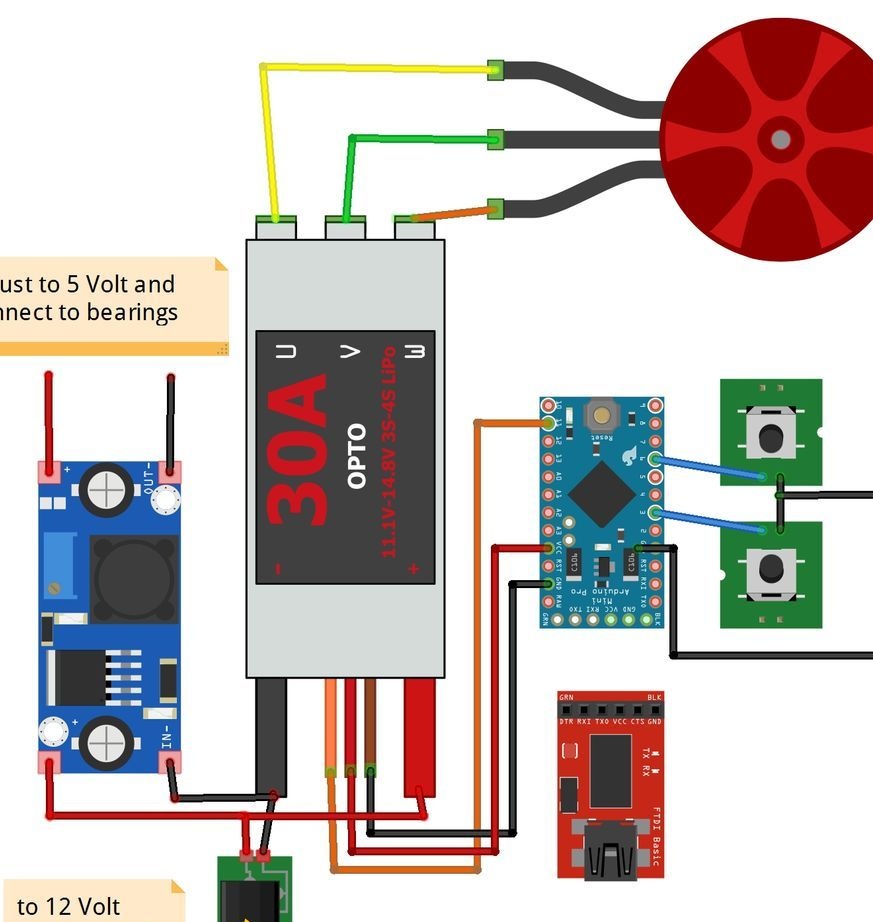
สองปุ่มบนไดอะแกรมถูกใช้เพื่อปรับความเร็ว เมื่อคุณเปิดเครื่อง ESC จะได้รับค่า 500 μs กดปุ่มใดปุ่มหนึ่งเพื่อเปิดเครื่องยนต์ ร่างจะใช้ค่า“ StartPos = 625” หลังจากนั้นเมื่อคุณปรับความเร็วค่านี้สามารถเปลี่ยนแปลงได้ กดปุ่มเป็นเวลาสองวินาทีและเครื่องยนต์ควรหยุด
การประกอบโครงสร้างหลัก
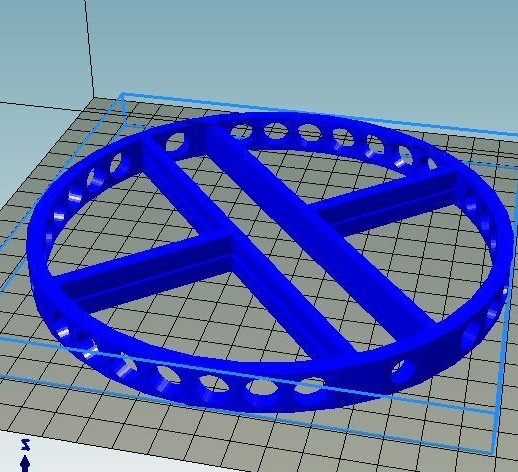

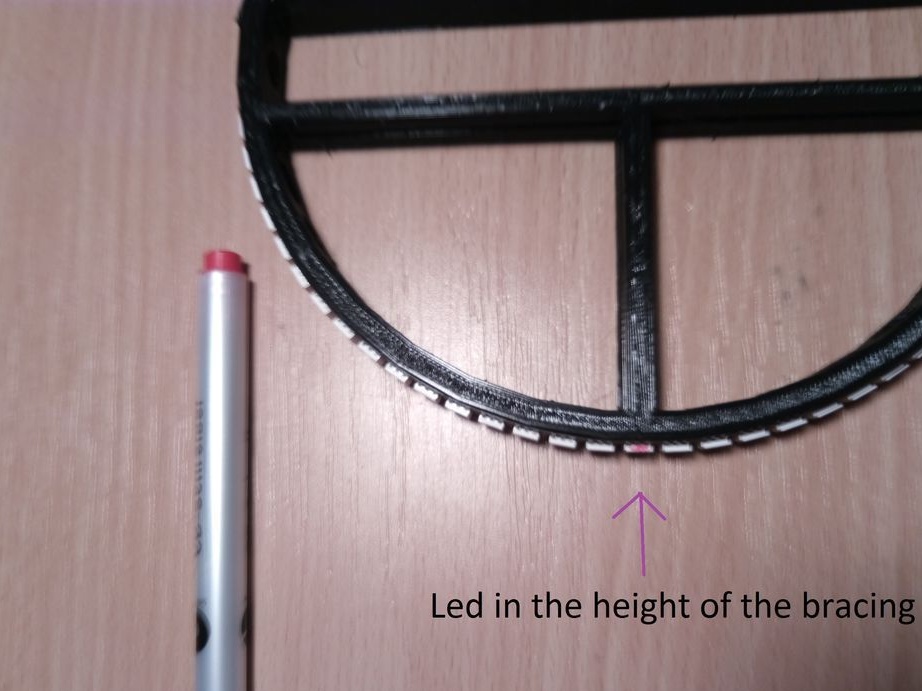
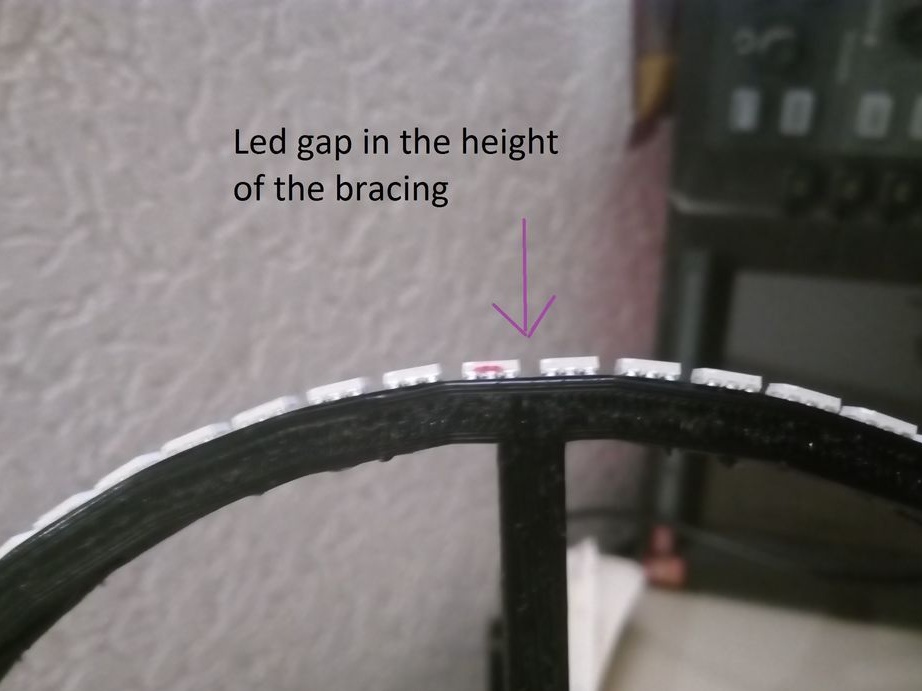


หากต้องการทำสิ่งนี้ให้พิมพ์วงแหวนเองจากไฟล์ที่แนบ ผู้เขียนทำหลาย ๆ รูเพื่อลดน้ำหนัก คุณสามารถใช้ท่อ PVC ได้ ไฟ LED 32 ดวงถูกตัดสองแถบ หลอด LED สองเส้นก่อให้เกิดเส้นคู่และคี่ จัดเรียงเทปเพื่อให้ LED ของหนึ่งแถบอยู่ระหว่าง LED ของอีกอันหนึ่ง แต่อยู่ที่ด้านหลัง หลังจากที่ติดเทปไว้แน่นแล้วคุณสามารถเชื่อมต่อไฟ LED ของบอร์ดคอนโทรลเลอร์ จากนั้นคุณต้องสร้างความสมดุลให้กับการชุมนุมทั้งหมด
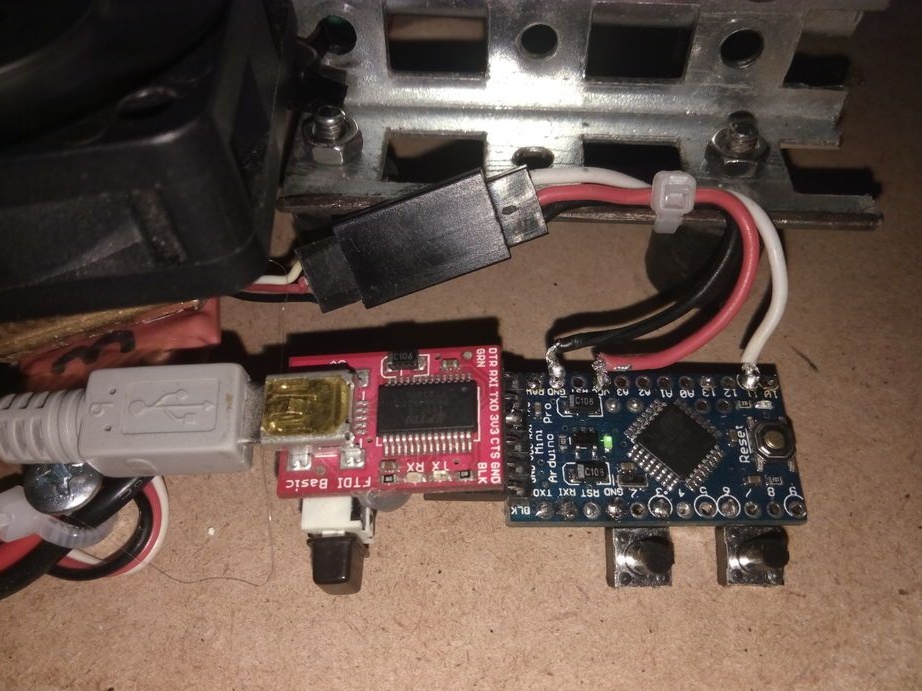
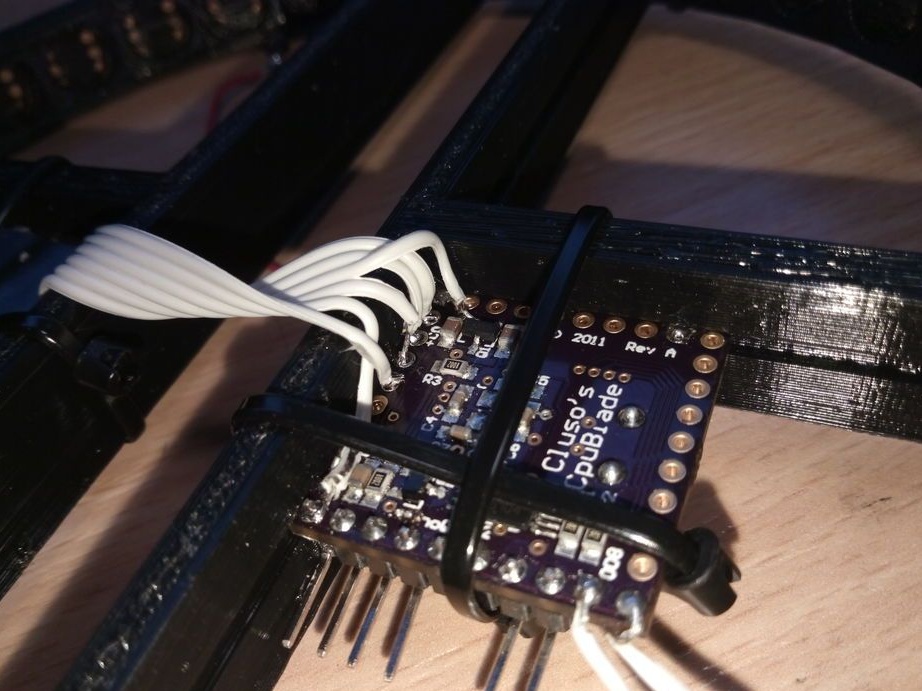
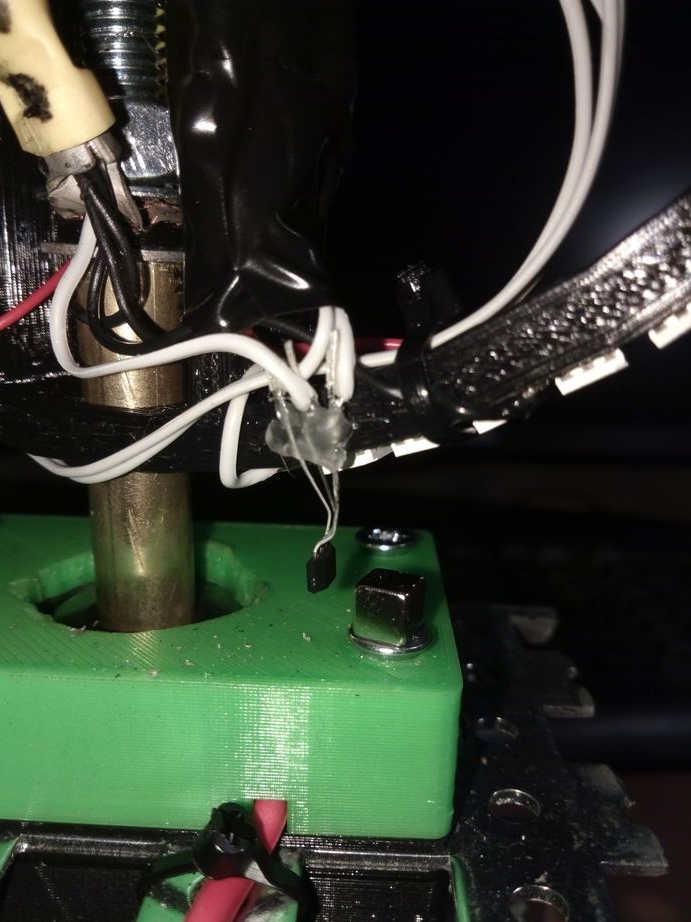
รูปภาพต่อไปนี้แสดงวิธีเชื่อมต่อส่วนประกอบทั้งหมดของอุปกรณ์เข้าด้วยกัน ภาพถ่ายยังแสดงเซ็นเซอร์ฮอลล์ที่ติดตั้งด้วยแม่เหล็ก
ในการเขียนโปรแกรมไมโครคอนโทรลเลอร์ Parallax Propeller ที่คุณต้องการ
อย่าเชื่อมต่ออุปกรณ์ของคุณกับ USB หรือพอร์ตอนุกรมจนกว่าคุณจะติดตั้งซอฟต์แวร์ รายละเอียดเพิ่มเติมเกี่ยวกับการอัพโหลดเฟิร์มแวร์ไปยัง Parallax สามารถพบได้
ผู้เขียนใช้บอร์ดที่เก่ากว่าและประหยัดกว่าในแง่ของการใช้พลังงานบอร์ด MCU เพราะเขาไม่สามารถหาไลบรารีใหม่บนแผงควบคุมใหม่ได้
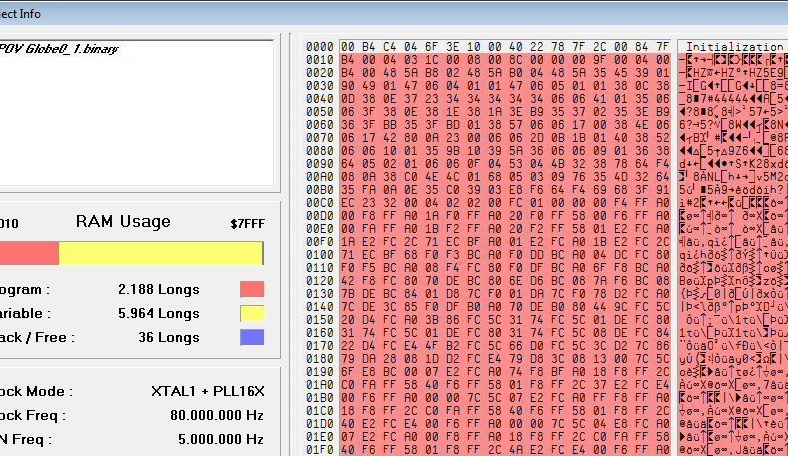
หลังจากที่คุณรวบรวมและเชื่อมต่อทุกอย่างคุณต้องตั้งโปรแกรมคอนโทรลเลอร์ ผู้เขียนทำสิ่งนี้ด้วยความช่วยเหลือ ไฟล์ที่มีเฟิร์มแวร์ในไฟล์เก็บถาวร
ตอนนี้คุณสามารถลองเริ่มอุปกรณ์ได้แล้ว จากจุดเริ่มต้นคัดลอกภาพทดสอบไปยังการ์ด SD และวางลงในช่อง
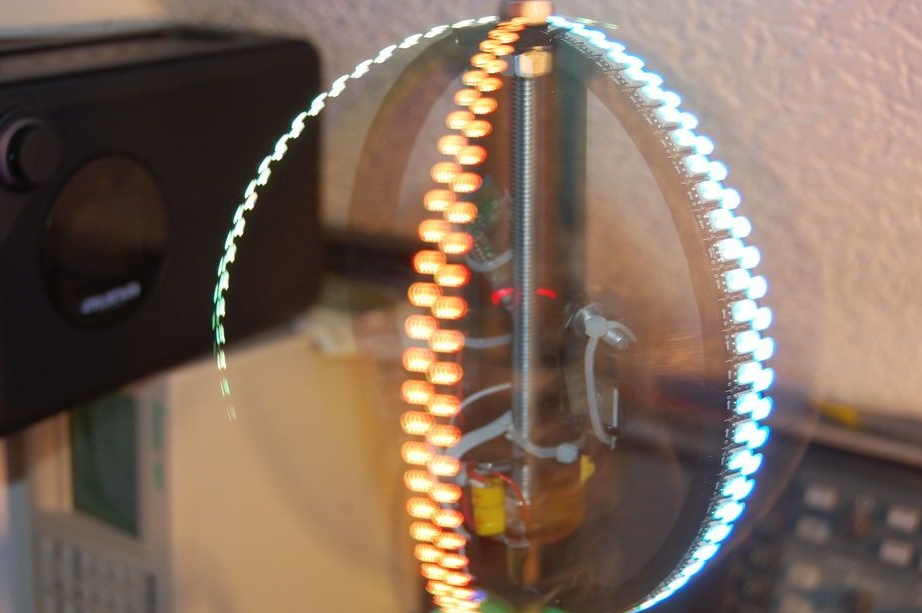
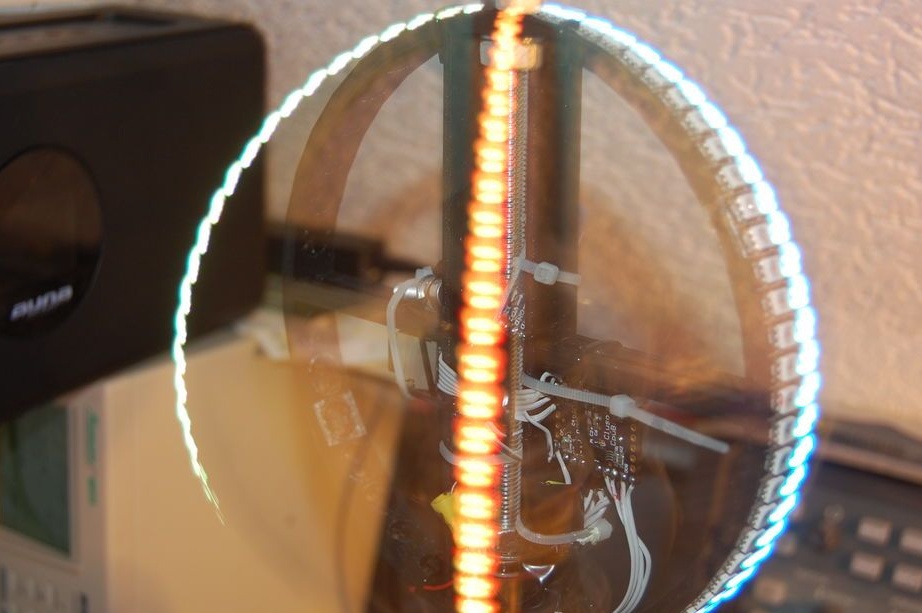
•ถ้าคุณหมุนวงแหวนด้วยมือไฟ LED ควรกระพริบทุกครั้งที่เซ็นเซอร์ฮอลล์ผ่านแม่เหล็ก
•เปิดเครื่อง การเพิ่มความเร็วด้วยปุ่มจำเป็นต้องให้แน่ใจว่าไฟ LED สว่างขึ้นตามที่แสดงในรูปภาพ 2 รูป
•เชื่อมต่อขั้ว Arduino กับตัวควบคุมมอเตอร์
•จำค่าที่แสดง
•ดับเครื่องยนต์
•เขียนค่าที่เก็บไว้ก่อนหน้านี้ไปยังตัวแปร "startPos"ร่าง POV_MotorControl
•โปรแกรม Arduino อีกครั้ง
ครั้งต่อไปที่มอเตอร์ของคุณสตาร์ททันทีที่ความเร็วที่เหมาะสม ตอนนี้คุณสามารถ "เติม" บนแผนที่ภาพใด ๆ ในการทำเช่นนี้คุณต้องปรับขนาดรูปภาพ 120x64 พิกเซลหมุนภาพทวนเข็มนาฬิกา 90 องศาและสะท้อนในแนวตั้ง ลดความสว่างของภาพเนื่องจากไฟ LED สว่างมาก เมื่อต้องการทำเช่นนี้จะเป็นการดีกว่าที่จะใช้การแก้ไขแกมม่าที่มีค่าสัมประสิทธิ์เท่ากับ 0.45
บันทึกภาพเป็น BPM 24 บิต ไม่มีการบีบอัด. หลังจากการเปลี่ยนแปลงทั้งหมดไฟล์เอาต์พุตจะมีขนาด 23094 ไบต์.



