ในคำแนะนำนี้เราจะมาดูกันว่าจะสร้างควอดคอปเตอร์ที่เรียบง่ายมากได้อย่างไร ไม่มีอุปกรณ์อิเล็กทรอนิกส์เซ็นเซอร์หรือสิ่งอื่นใดที่ซับซ้อน อิเล็กทรอนิกส์เพียงอย่างเดียวคือคอนโทรลเลอร์ซึ่งคุณสามารถควบคุมควอดคอปเตอร์เหนืออากาศได้ พลังงานเพียงพอที่จะยกกล้องขนาดเล็กได้ กำลังยกขึ้นอยู่กับวัสดุที่ใช้กำลังของเครื่องยนต์และขนาดของใบพัด
เพื่อความสะดวกในการออกแบบกาวร้อนสามารถถูกแทนที่ด้วย superglue ในบางสถานที่ตัดบางส่วนของเฟรมทำให้เครื่องยนต์วงเล็บแคบลงและอื่น ๆ
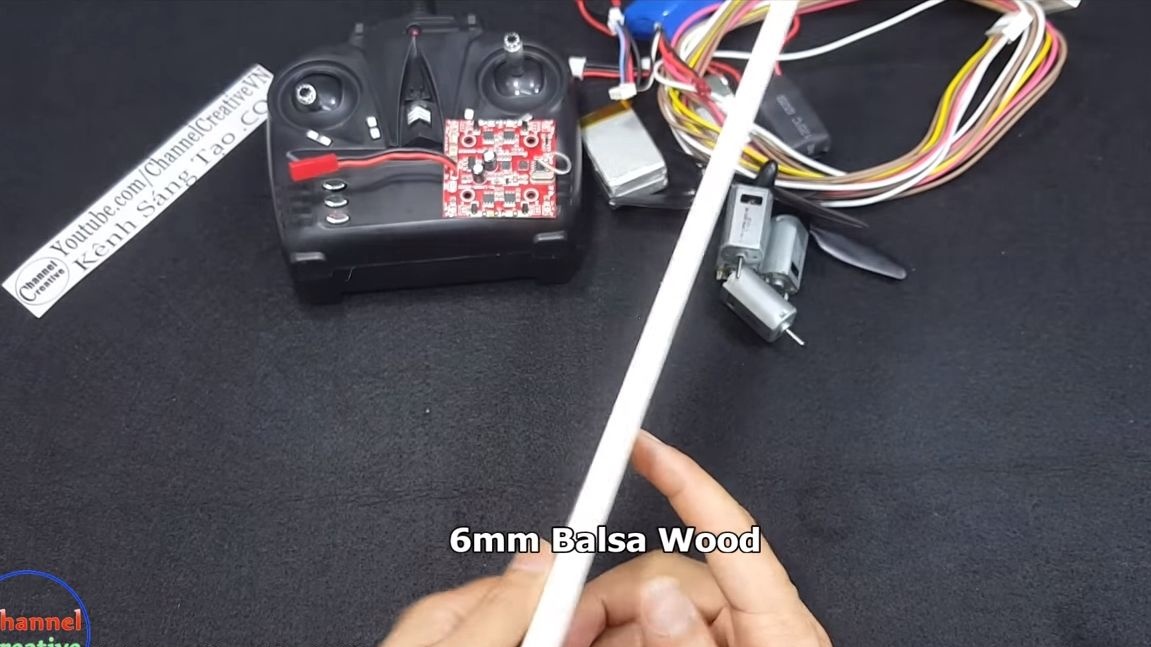
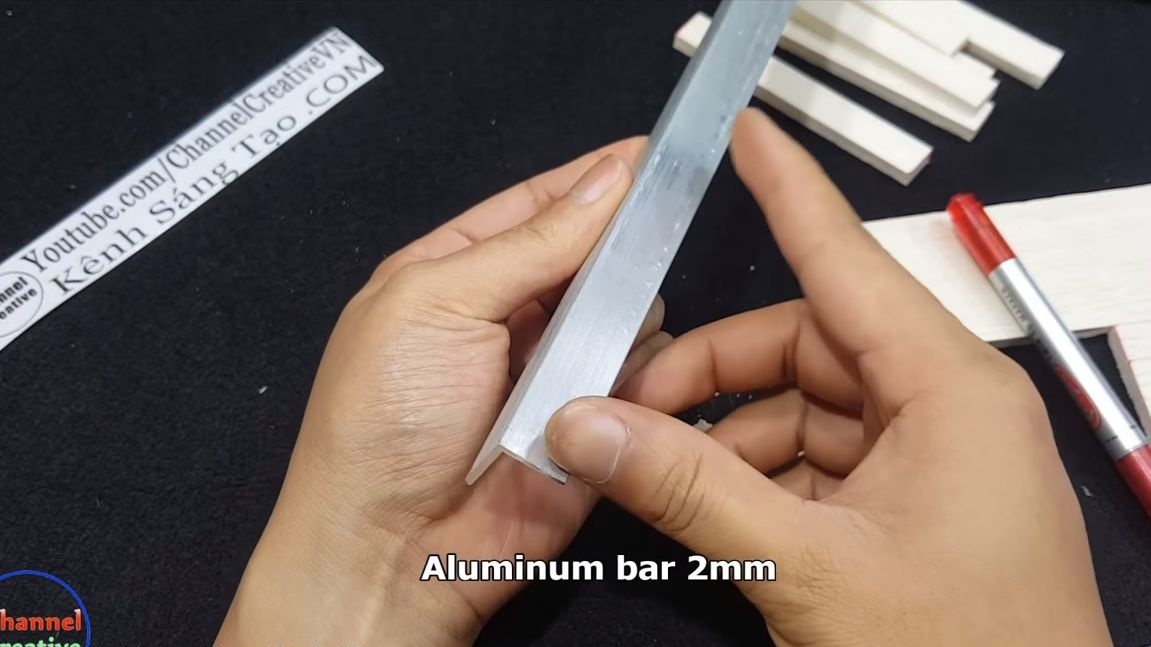
ผู้เขียนใช้บัลซาเป็นวัสดุหลักในการผลิตเฟรม ต้นไม้นี้มีน้ำหนักเบาใช้งานง่ายและวัสดุมีความแข็งแรงเพียงพอที่จะทำ ทำที่บ้าน. เครื่องยนต์ติดตั้งอยู่ในวงเล็บทำจากแผ่นอลูมิเนียม
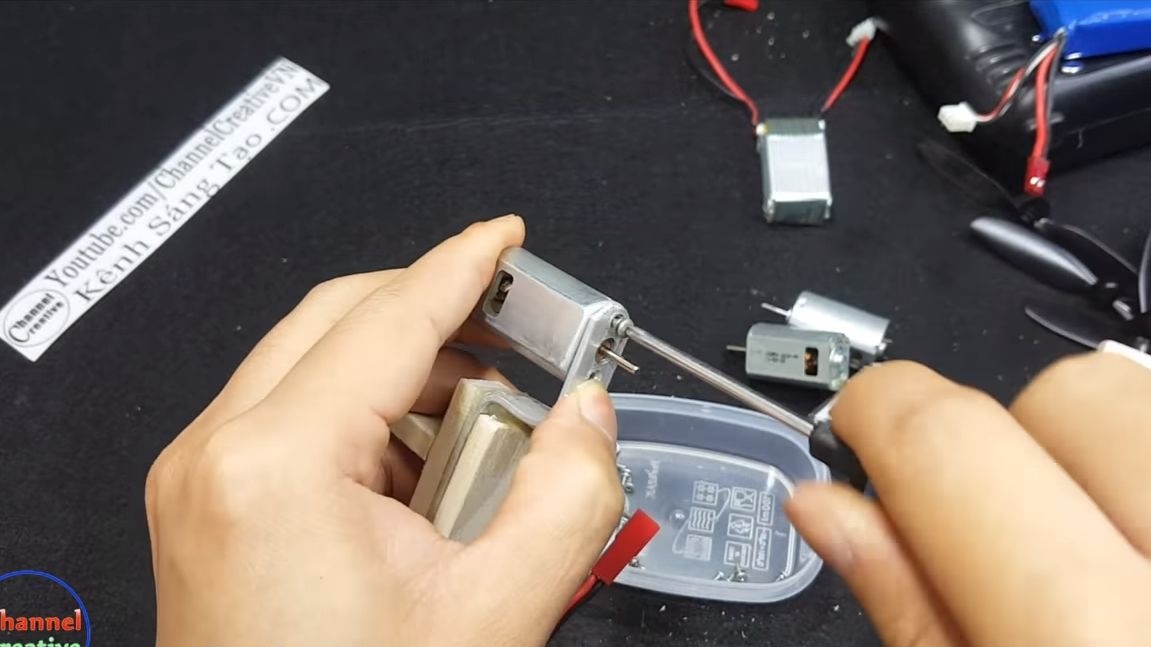
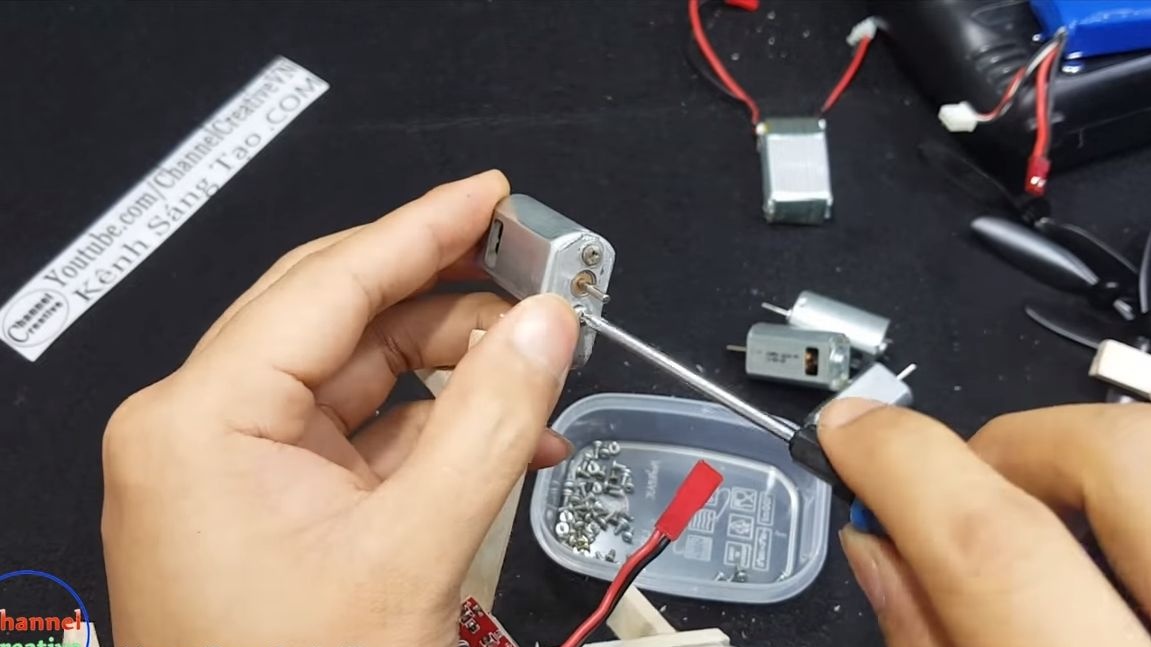
เครื่องยนต์สี่รุ่น 180 ถูกใช้ที่นี่เป็นเครื่องยนต์พวกมันทำงานร่วมกับสกรู 10 ซม. สกรู "ขวา" และ "ซ้าย" สองตัวถูกนำมาใช้ในการออกแบบ
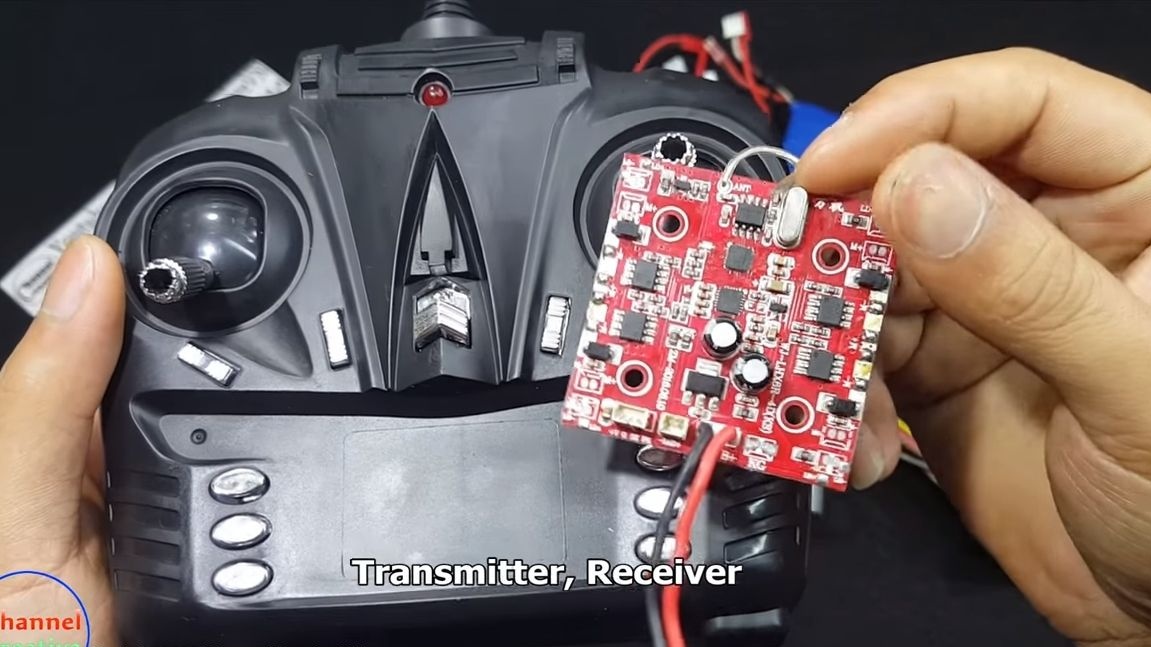
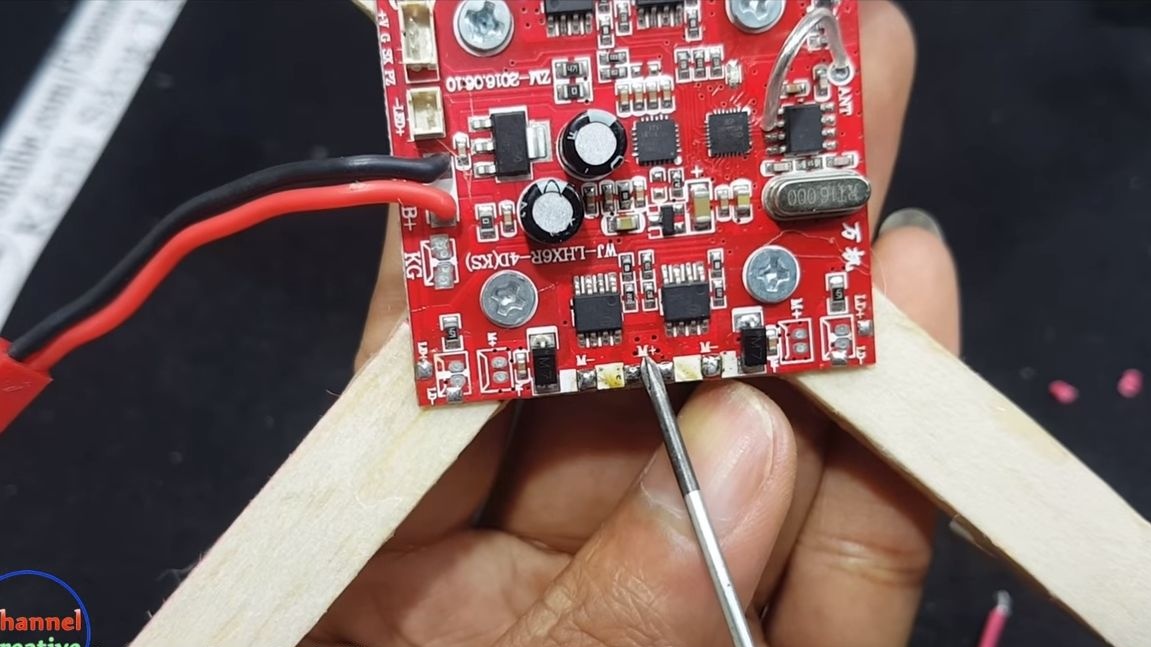
ในฐานะที่เป็นอุปกรณ์อิเล็กทรอนิกส์ควบคุมได้มีการตัดสินใจใช้บอร์ด WJ-LHX6R-40
ดังนั้นเราจึงเริ่มการชุมนุม
วัสดุและเครื่องมือที่ผู้แต่งใช้:
รายการวัสดุ:
- บอร์ดบัลซาร์ที่มีความหนา 6 มม.
- มุมอลูมิเนียม (เป็นแหล่งของแผ่นอลูมิเนียม);
- ;
- (สองข้างขวาและสองซ้าย 10 ซม.);
- (WJ-LHX6R-40);
- แบตเตอรี่
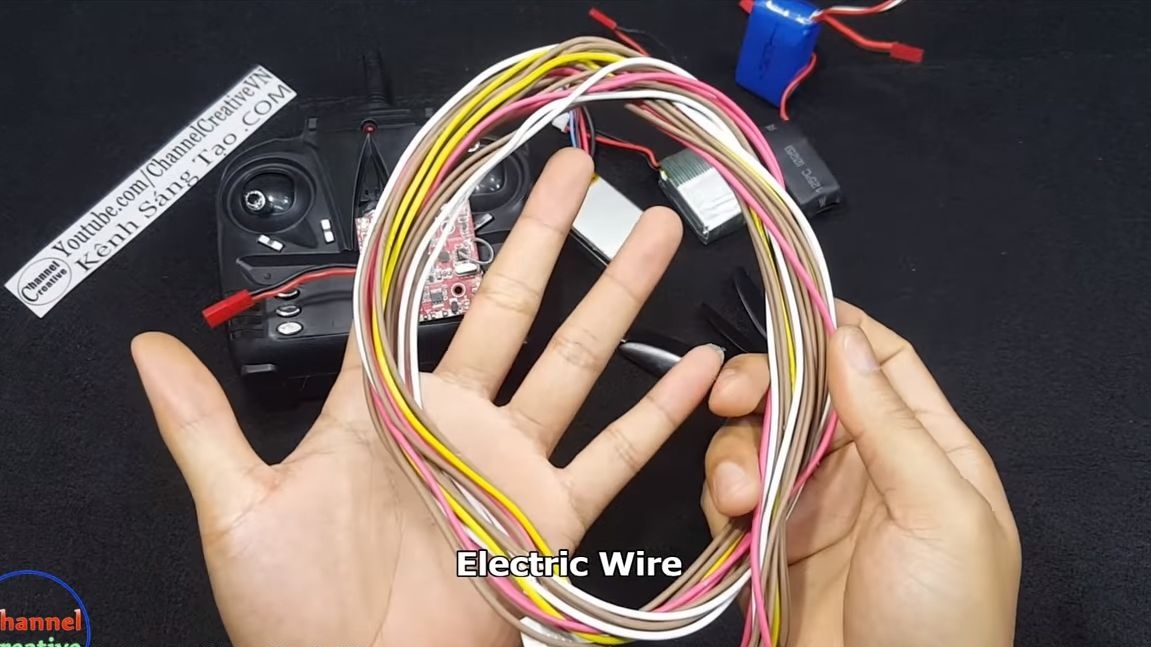
- สายไฟ
- เนกไทพลาสติก
- ฟันเฟืองและสิ่งของ




รายการเครื่องมือ:
- เจาะ;
- เลื่อยสำหรับโลหะ
- มีดเสมียน
- ไม้บรรทัด
- ดินสอ
- ปืนกาว
- กรรไกร
- หัวแร้ง
กระบวนการผลิต Quadrocopter:
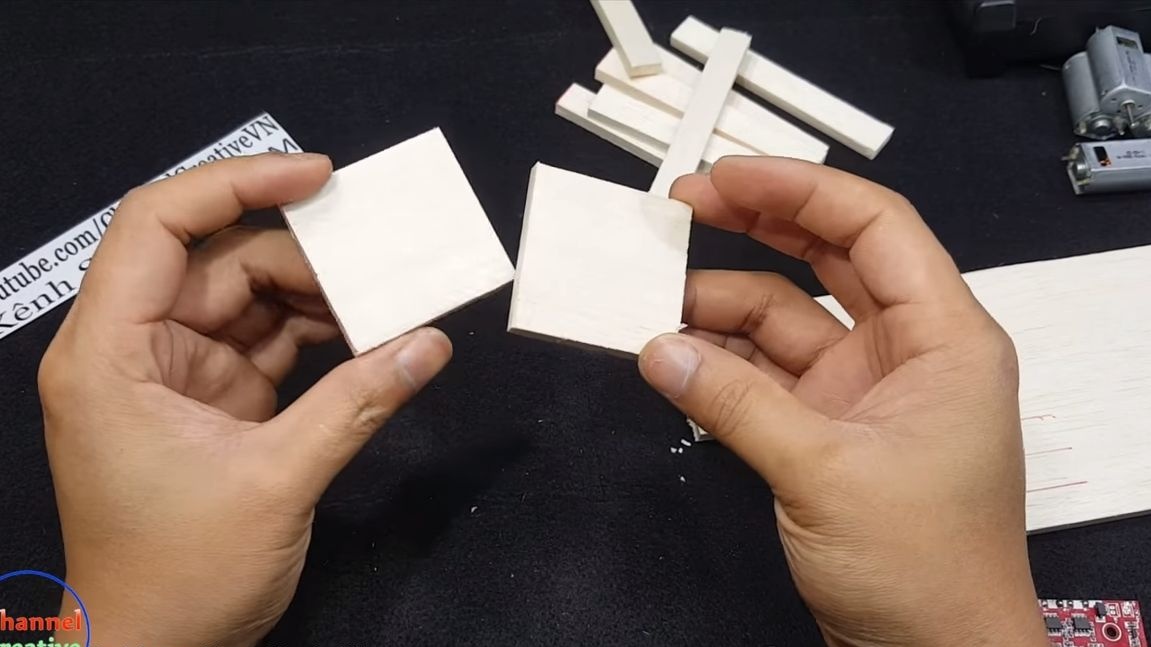
ขั้นตอนแรก การผลิตภาคกลางของเฟรม
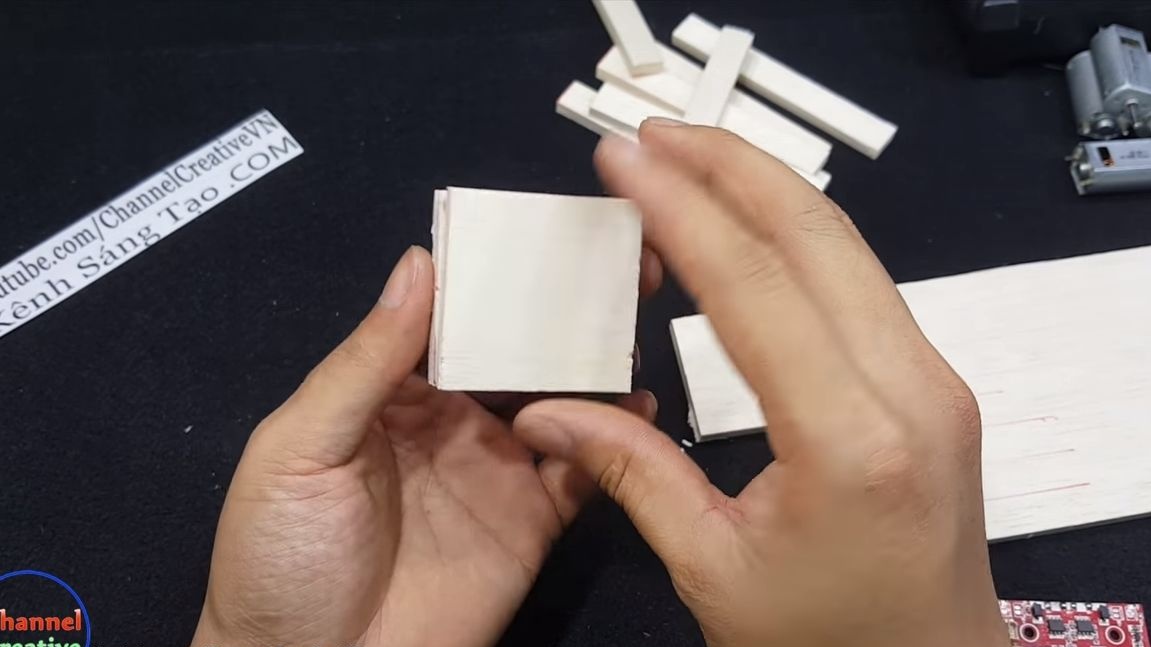
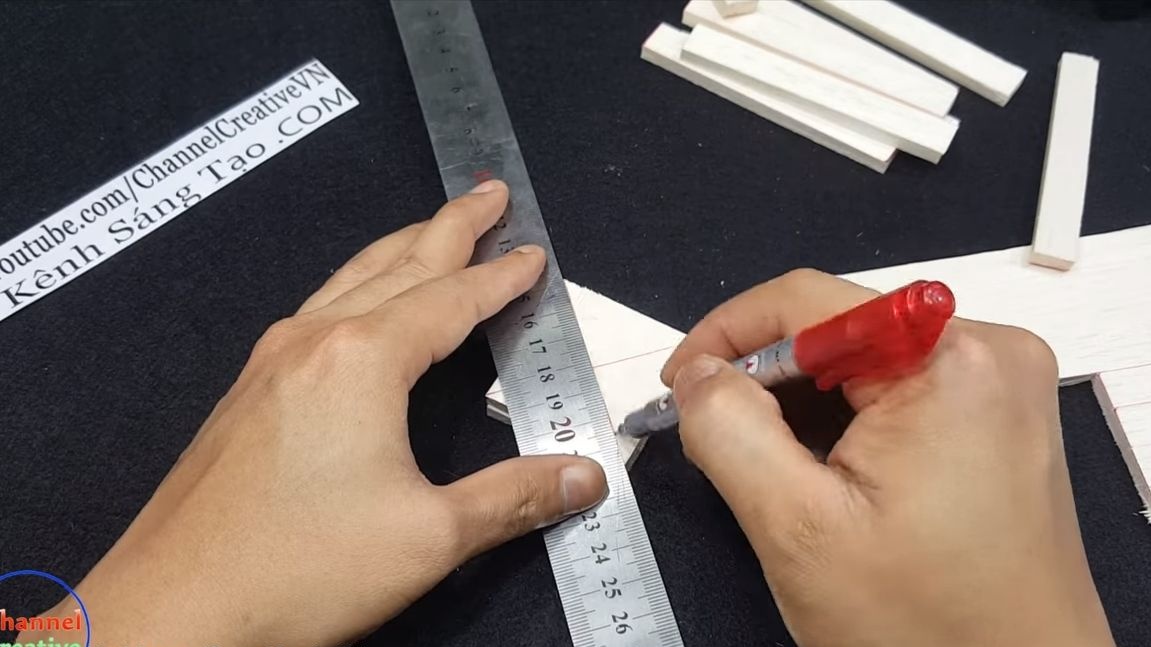
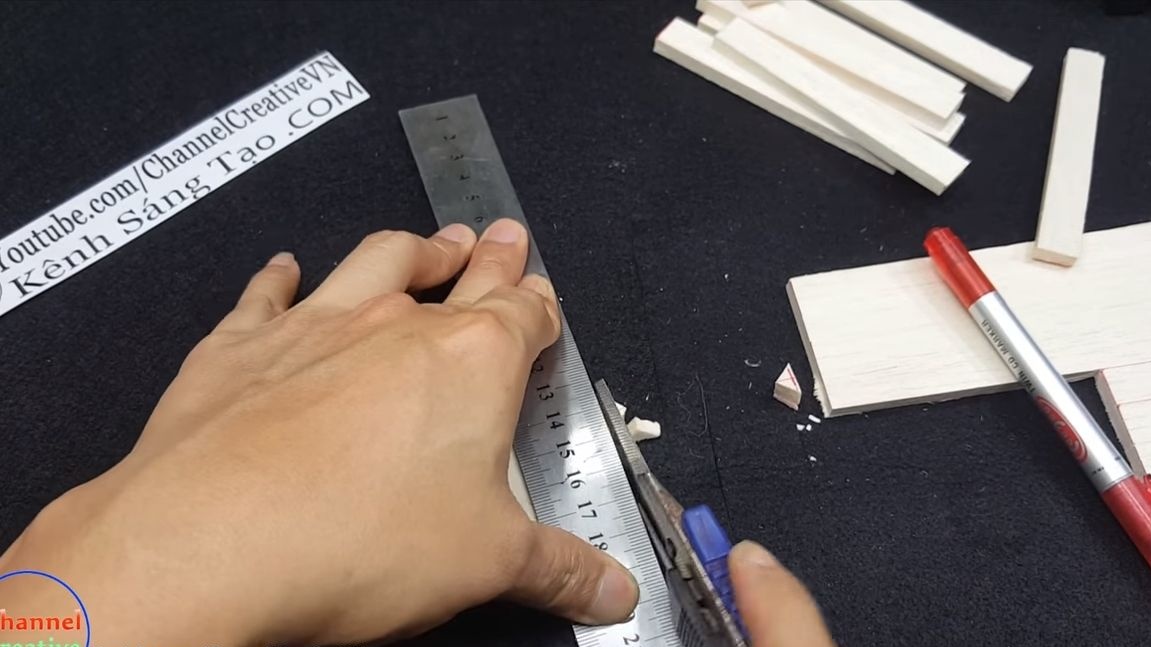
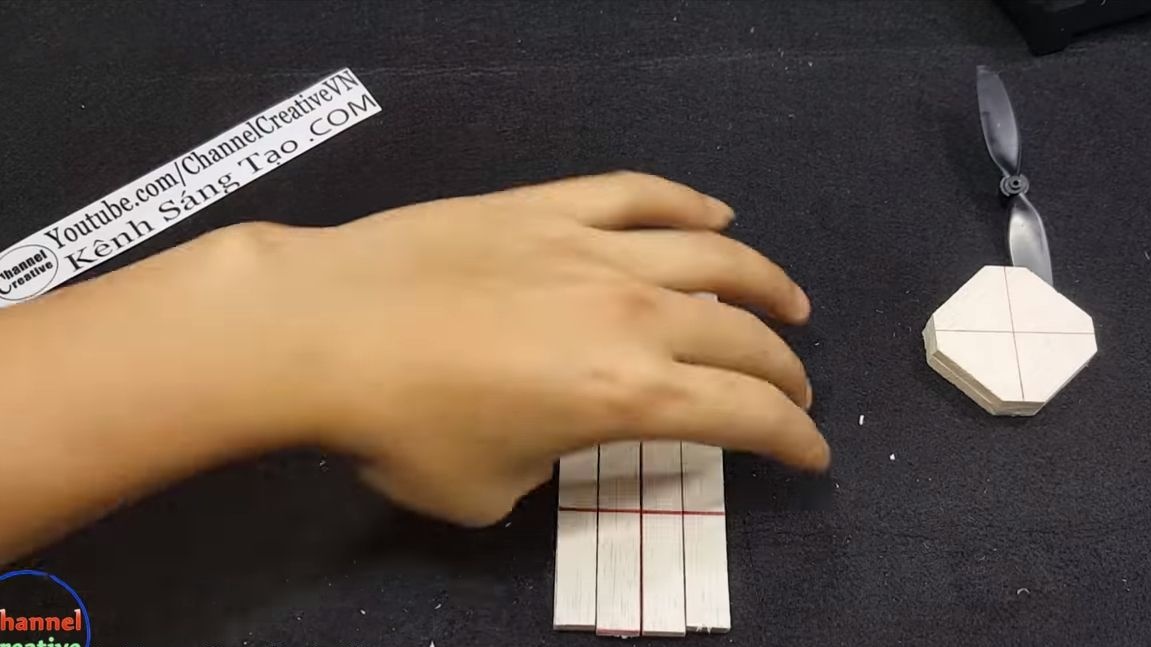
เพื่อให้ส่วนนี้คุณจะต้องตัดสอง balsa จาก balsa และกาวเข้าด้วยกันโดยใช้กาวร้อน ขนาดของชิ้นส่วนจะถูกเลือกขึ้นอยู่กับขนาดของตัวควบคุมที่ใช้และแบตเตอรี่ quadcopter ต้องมีความสมดุลอย่างดีน้ำหนักบรรทุกทั้งหมดตั้งอยู่อย่างชัดเจนในศูนย์
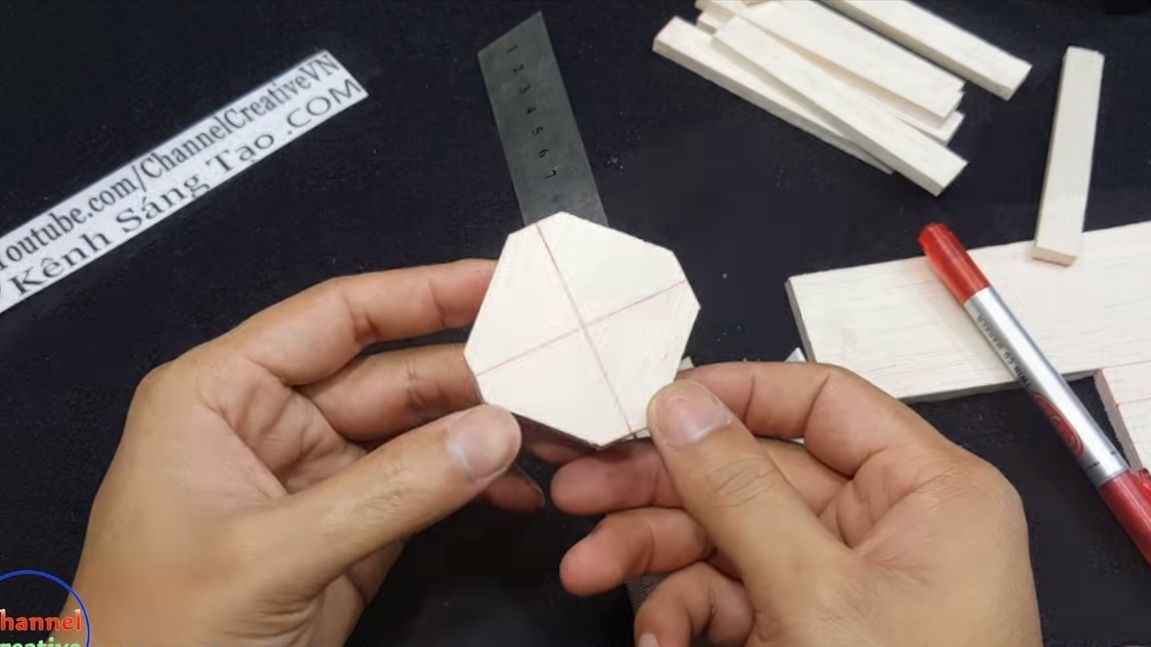
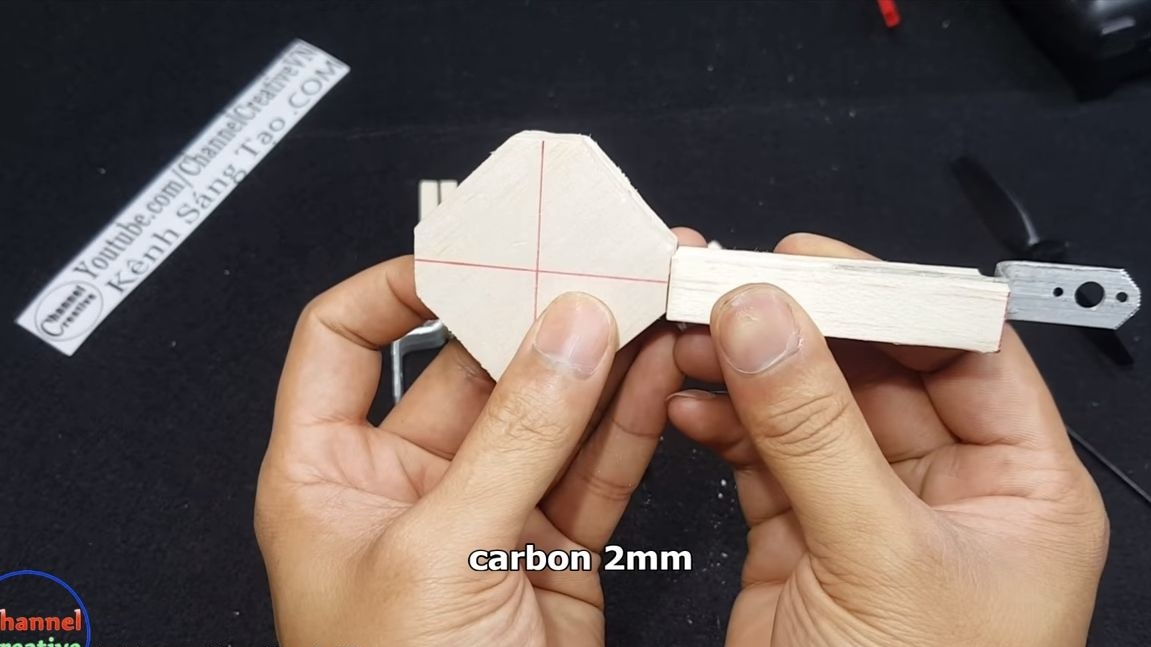
จากนั้นตัดมุมสี่เหลี่ยมเพื่อให้ได้ 8-gon สิ่งนี้จะช่วยให้คันโยกที่เครื่องยนต์ติดตั้งเพื่อยึดกับส่วนกลาง
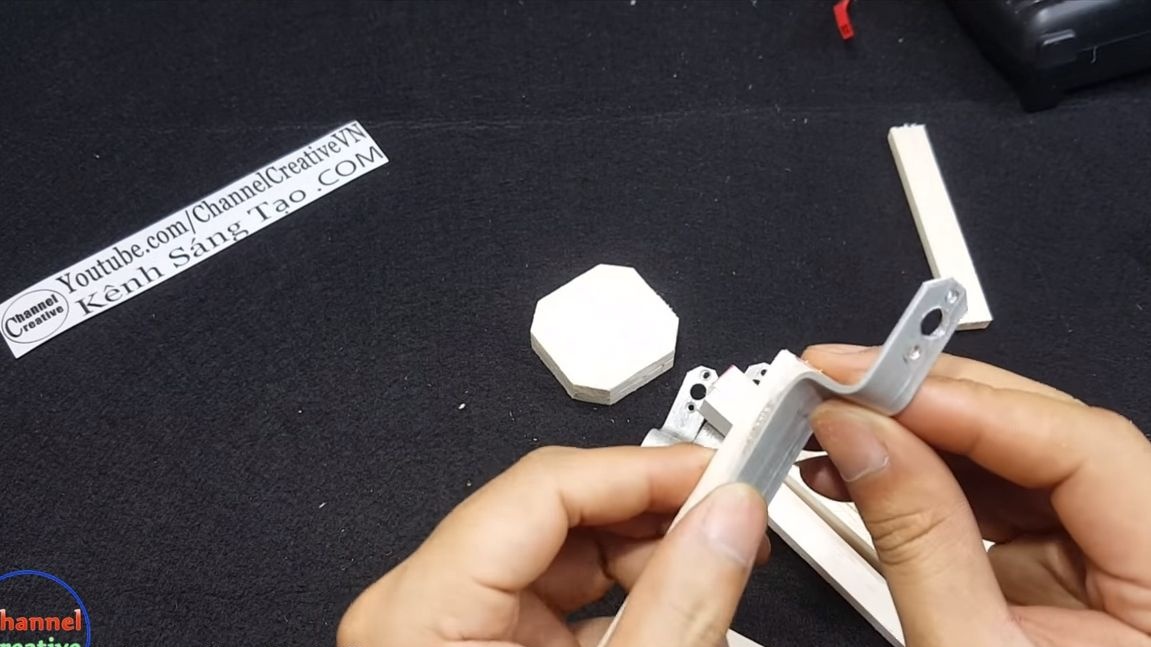
ขั้นตอนที่สอง การผลิตตัวยึดเครื่องยนต์
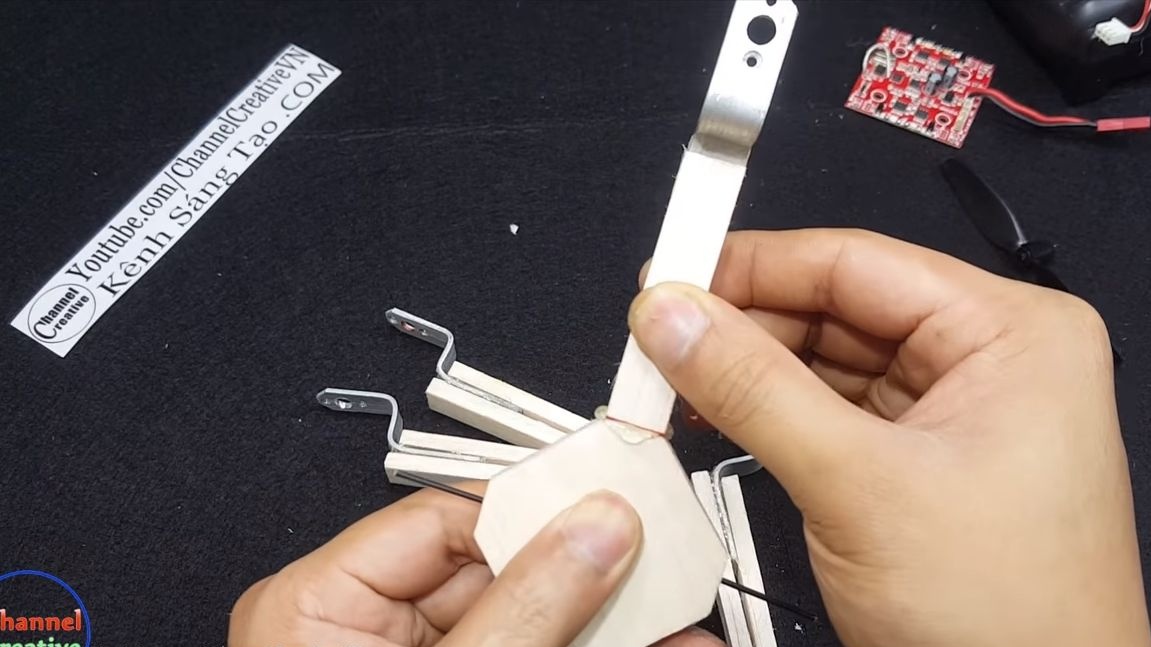
เครื่องยนต์จะต้องได้รับการแก้ไขอย่างแน่นหนาเพื่อจุดประสงค์เหล่านี้ผู้เขียนจึงตัดสินใจที่จะทำวงเล็บจากแผ่นอลูมิเนียมแหล่งที่มาของวัสดุเป็นมุมอลูมิเนียมตัดแผ่นที่จำเป็นตามความยาวโดยใช้เลือยตัดโลหะสำหรับโลหะ ถัดไปคุณจะต้องร่าง 3 หลุมในแต่ละแผ่นหนึ่งศูนย์กลางสำหรับเพลามอเตอร์และส่วนที่ยื่นออกมาของที่อยู่อาศัยและอีกสองคนสำหรับสกรูยึด






ถัดไปให้แผ่นรูปร่างเหมือนที่ผู้เขียนทำ วงเล็บที่ทำควรมีความยาวเท่ากันไม่งั้น Quadrocopter จะมีความไม่สมดุล
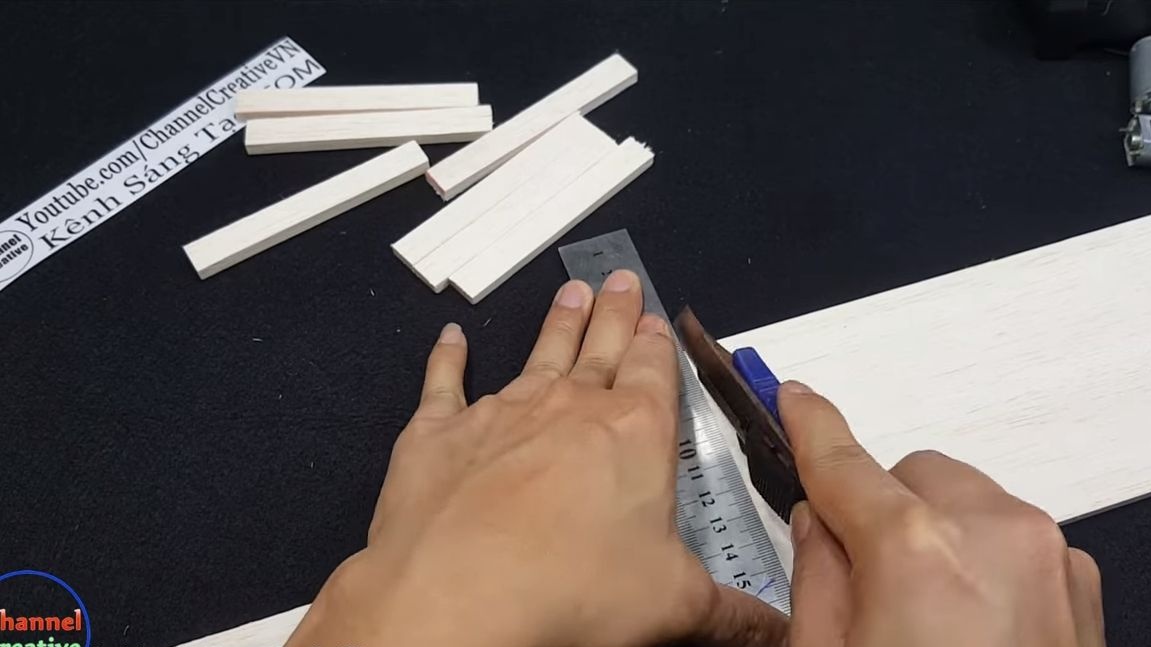
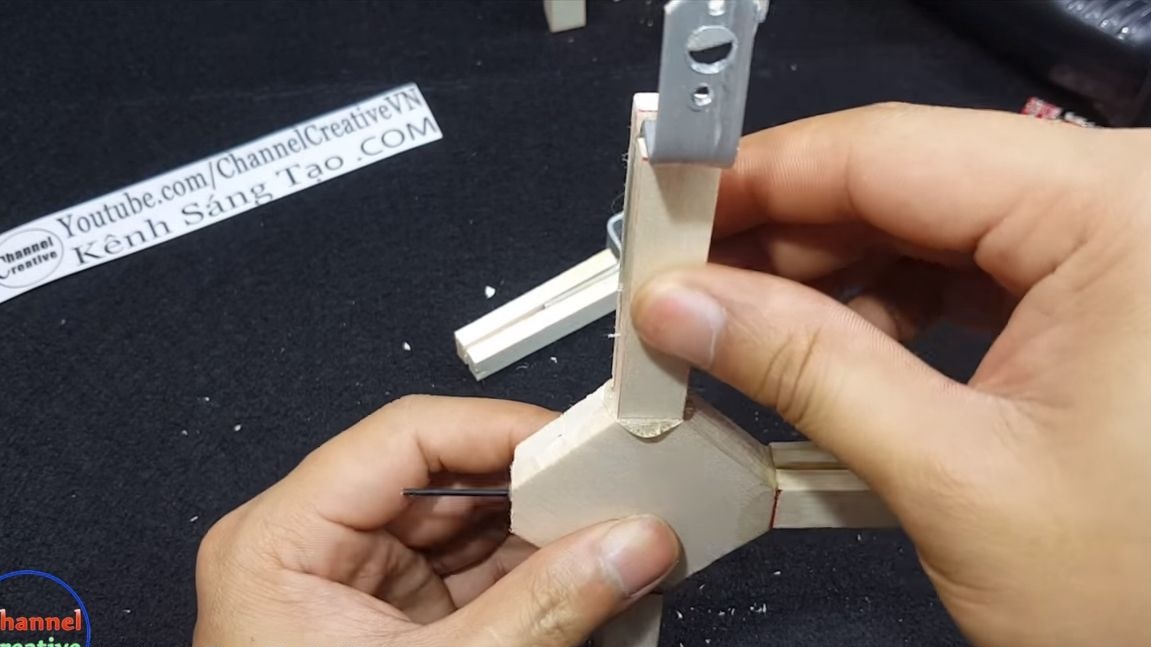
ขั้นตอนที่สาม ทำให้คันโยก
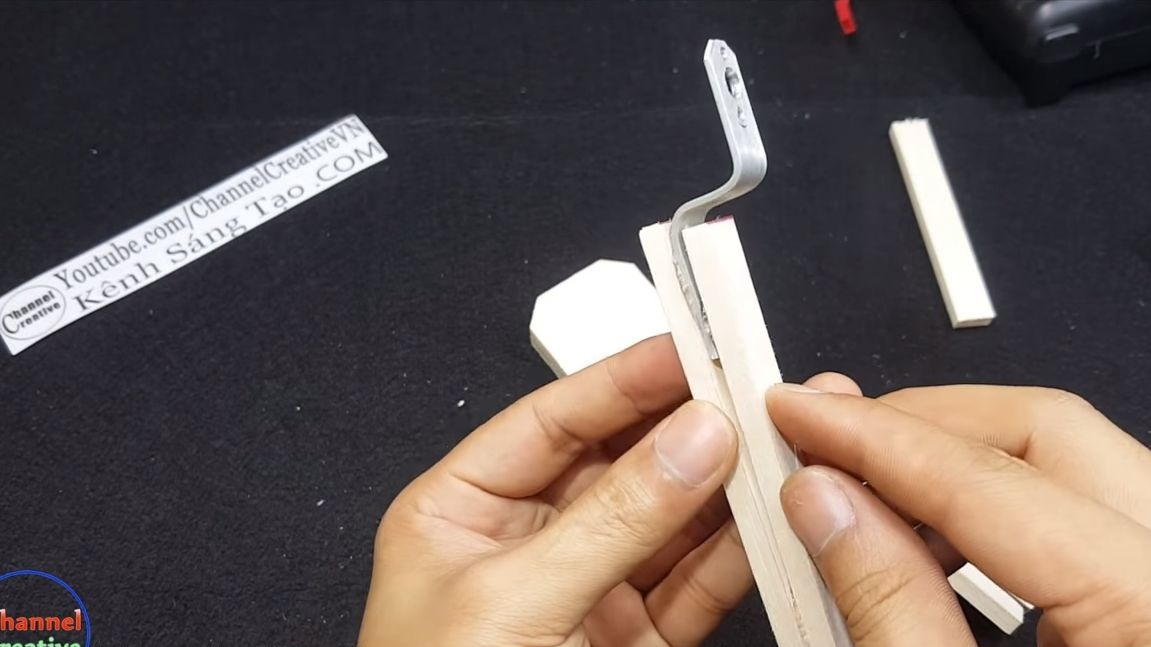
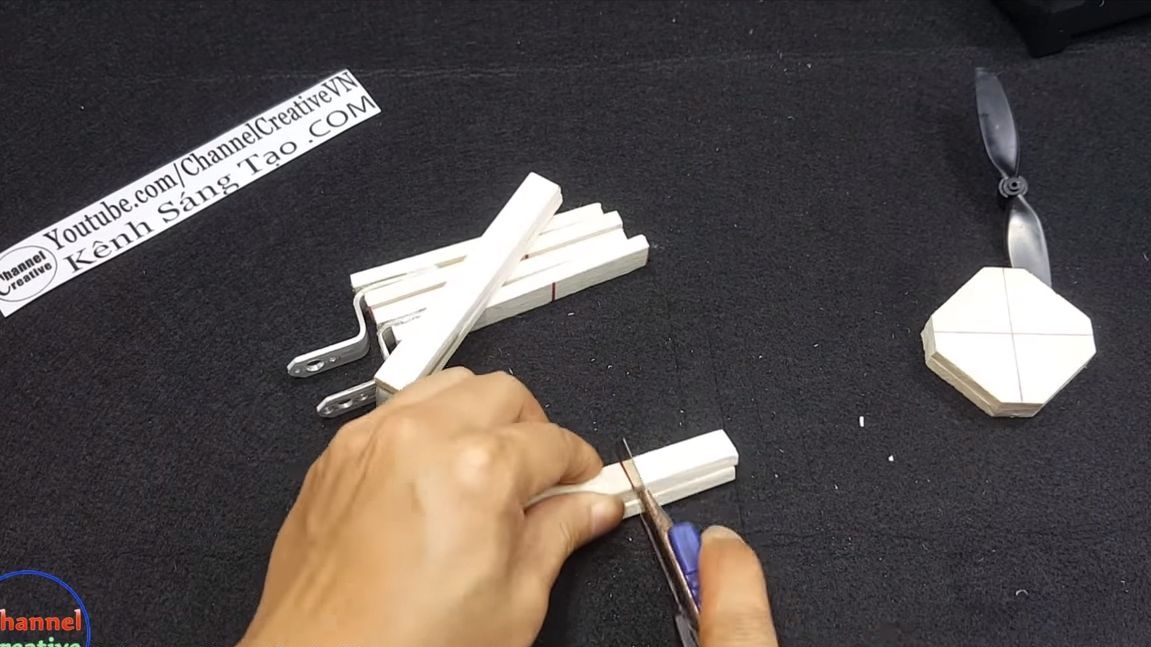
4 คันติดอยู่กับส่วนกลางในรูปแบบของ 8-gon ในตอนท้ายของแต่ละที่มีการติดตั้งเครื่องยนต์ เราสร้างคันโยกของบัลซาแต่ละคันเป็นสองชั้นนั่นคือทั้งหมด 8 ชิ้นเป็นสิ่งจำเป็น เราทำเครื่องหมายทุกอย่างบนกระดานบัลซาและตัดออกด้วยความช่วยเหลือของมีดที่ใช้ในสำนักงานไม้นี้ถูกตัดได้ง่ายมาก
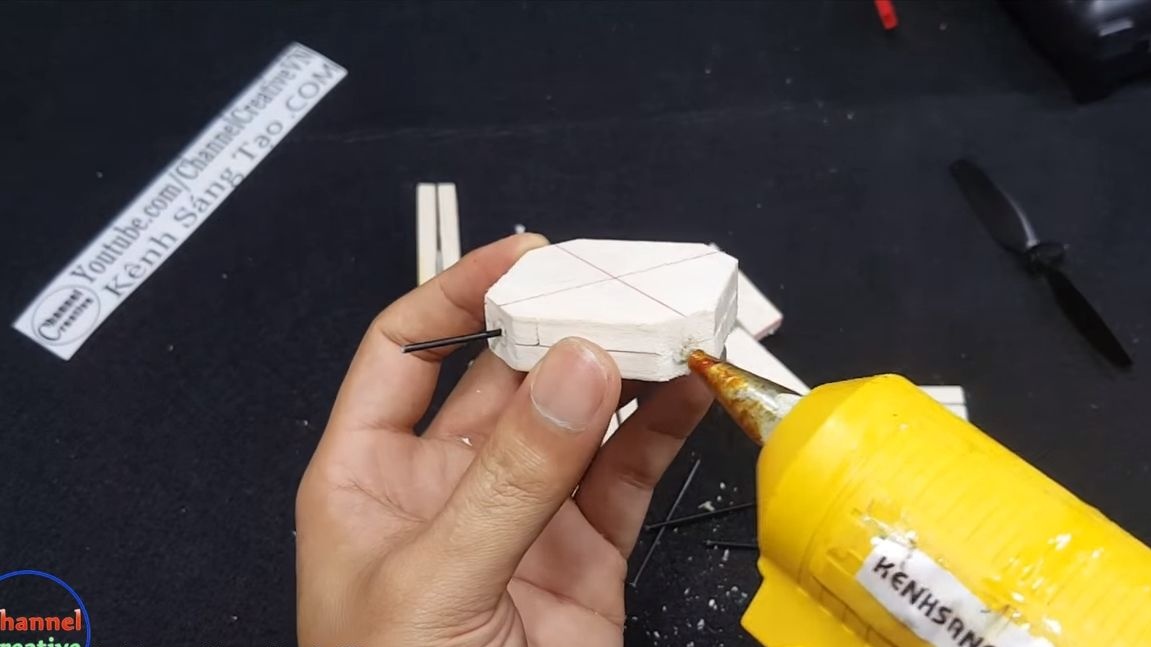
เราใช้กาวร้อนและยึดตัวยึดกับคันโยก แต่ที่นี่ความแม่นยำเป็นสิ่งสำคัญอย่างยิ่งมันจะดีกว่าที่จะทำเครื่องหมายสถานที่สำหรับการติดตั้งล่วงหน้าด้วยดินสอ จากนั้นเราใช้กาวร้อนอีกครั้งและวางแผ่นรองที่สองไว้ด้านบน เป็นผลให้วงเล็บของเราถูกยึดแน่นระหว่างสองชิ้นและยึดด้วยกาวร้อน ในทำนองเดียวกันชิ้นส่วนเฟรมที่เหลืออีกสามชิ้นจะถูกผลิตขึ้น
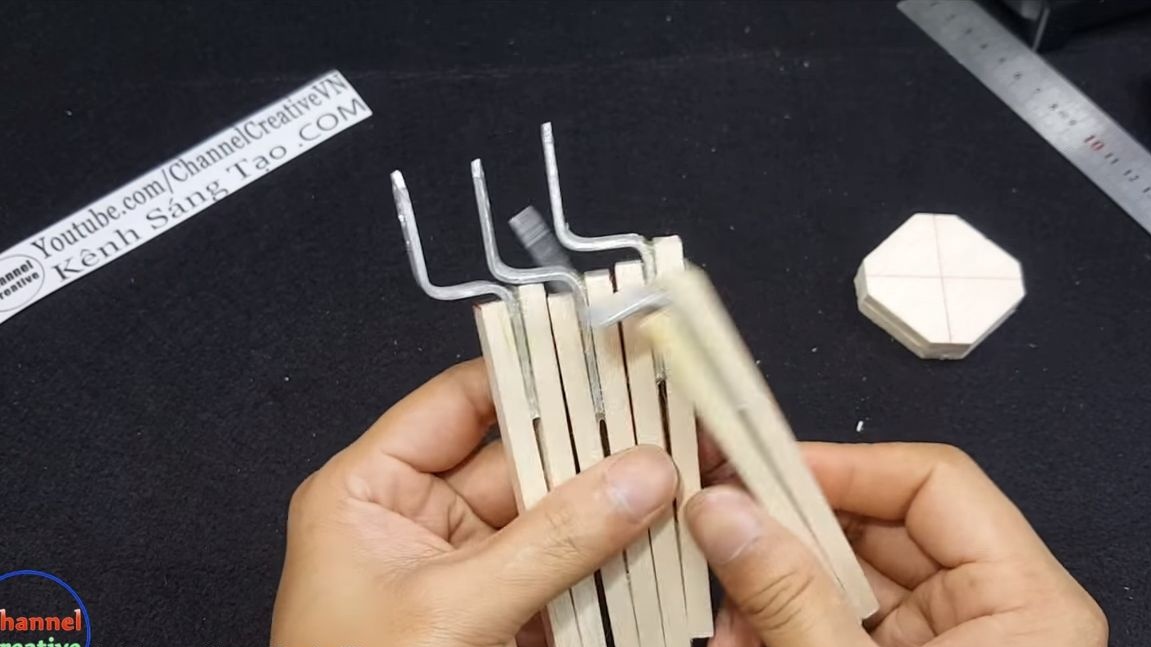
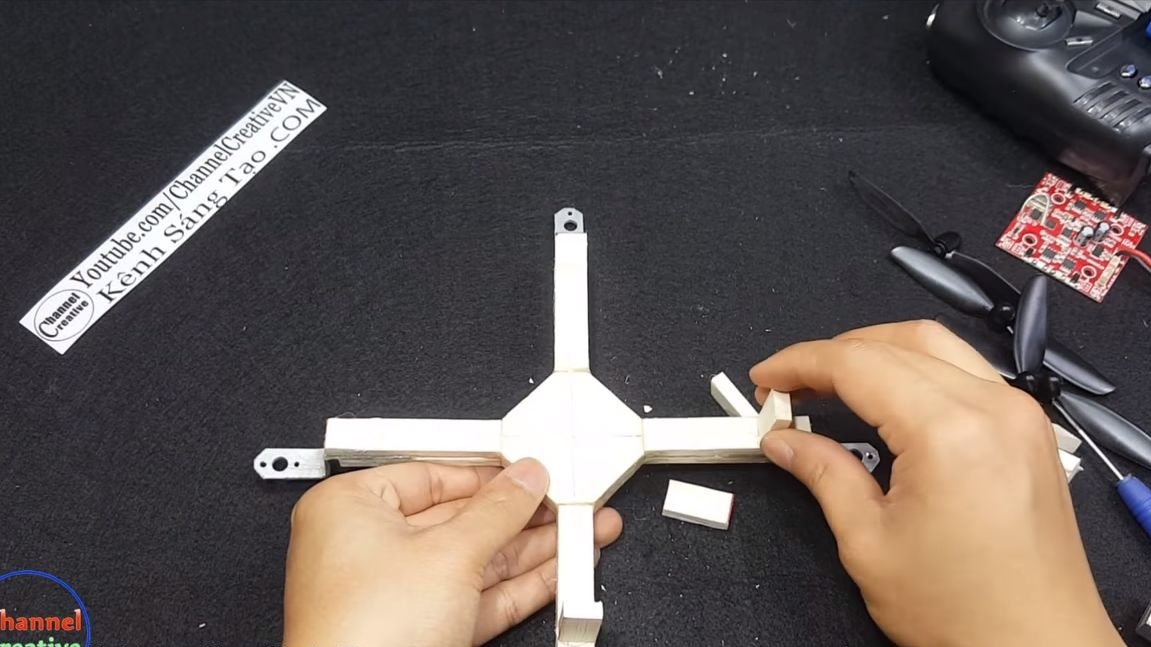
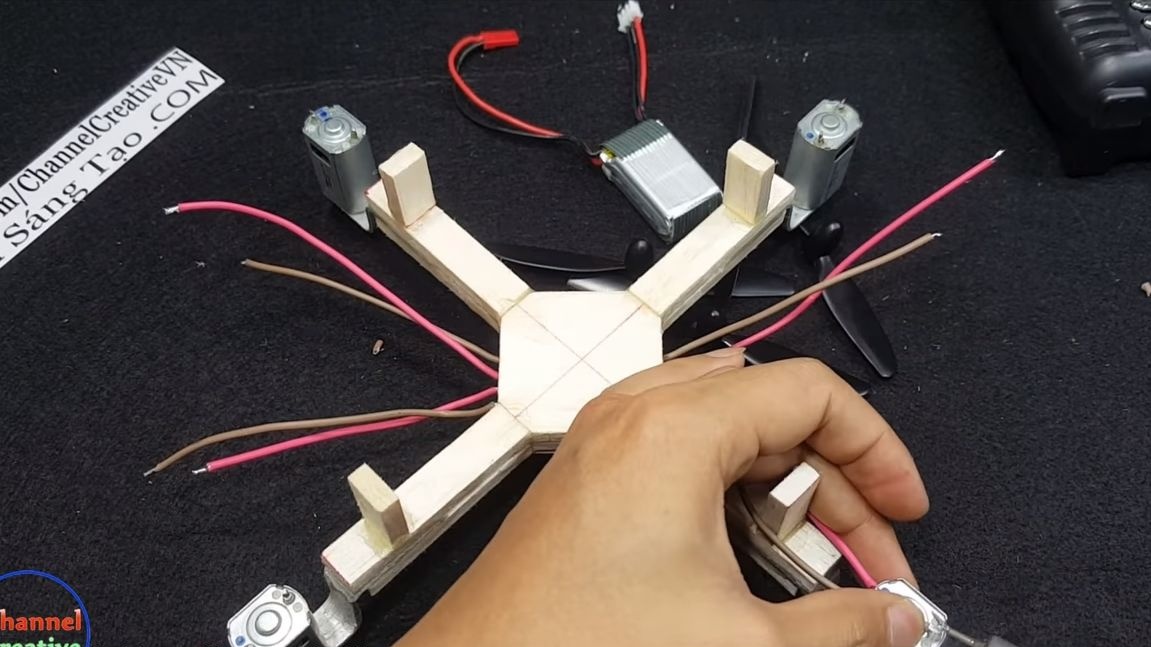
ขั้นตอนที่สี่ ประกอบกรอบ
จัดตำแหน่ง "คันโยก" ทั้ง 4 ตัวให้ยาวเท่ากันจากนั้นทำการเจาะรูที่ส่วนท้าย นอกจากนี้ยังจำเป็นต้องเจาะรูที่ส่วนกลางอีกอันหนึ่งสำหรับแต่ละคัน คันโยกจะติดกับส่วนกลางโดยใช้กาวร้อนและแกนคาร์บอนไฟเบอร์เสริมการออกแบบ คุณยังสามารถใช้หลอดจากปากกาไม้จิ้มฟันหรืออะไรทำนองนั้น
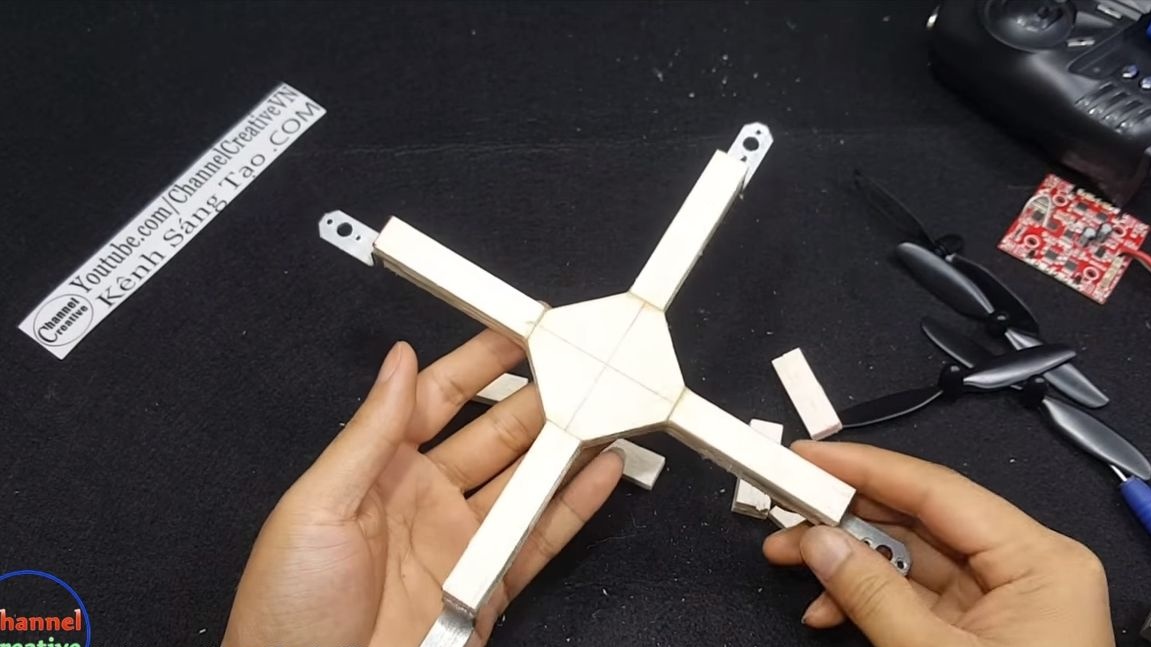
ในตอนท้ายของเฟรมกาว 4 ขาไปที่ฐาน พวกเขาจะต้องใช้เพื่อให้ Quadrocopter สามารถลงจอดได้โดยไม่ทำลายเฟรม เราทำขาจากบัลซา นอกจากนี้คุณยังสามารถฉลาดและติดฟองน้ำครัวหรืออะไรแบบนั้นเพื่อให้ quadrocopter ตกลงมาอย่างนุ่มนวล
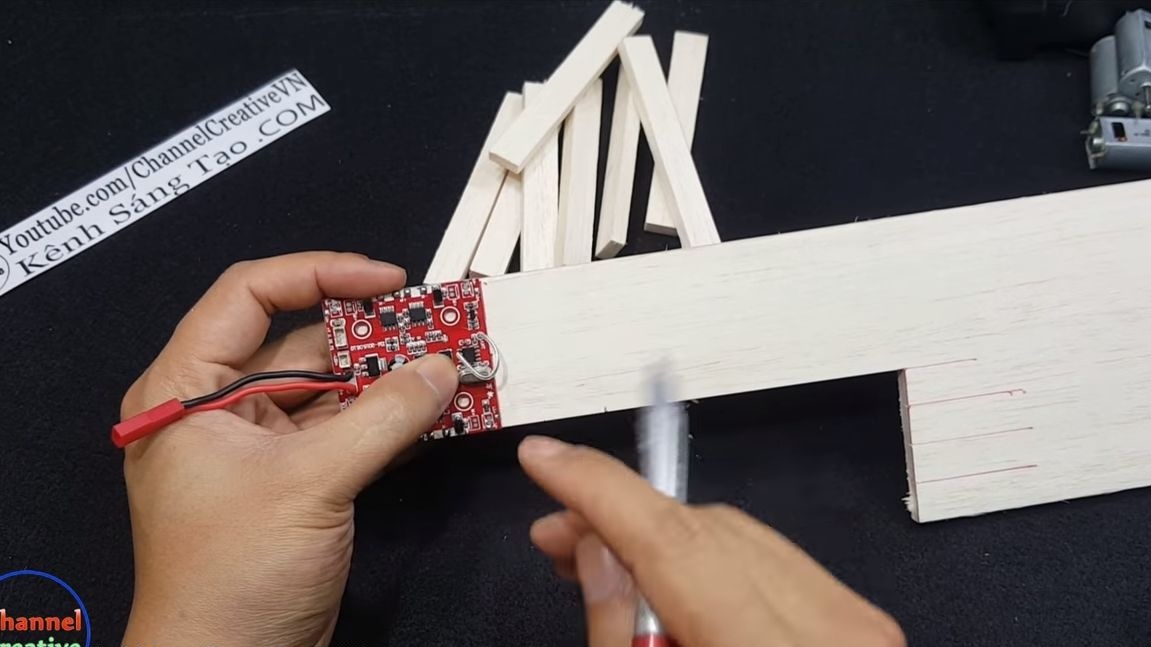
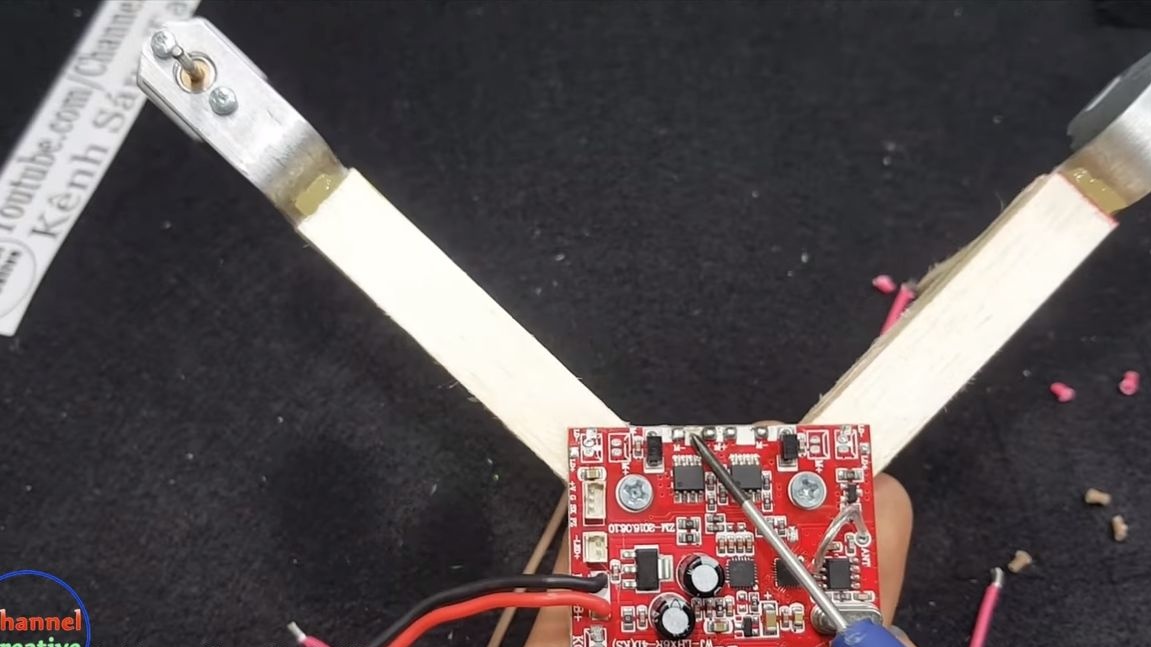
ขั้นตอนที่ห้า ติดตั้งคอนโทรลเลอร์
ตัวควบคุมจะต้องได้รับการแก้ไขในศูนย์ที่ไซต์ที่กำหนด ผู้เขียนยึดมันด้วยสกรูสำหรับไม้ ในอนาคตตัวควบคุมจะต้องได้รับการปกป้องจากความชื้นและฝุ่นละอองเนื่องจากมีชิ้นส่วนขนาดเล็กจำนวนมากที่สามารถล้มเหลวได้ง่ายหากมีสิ่งสกปรกเข้ามา
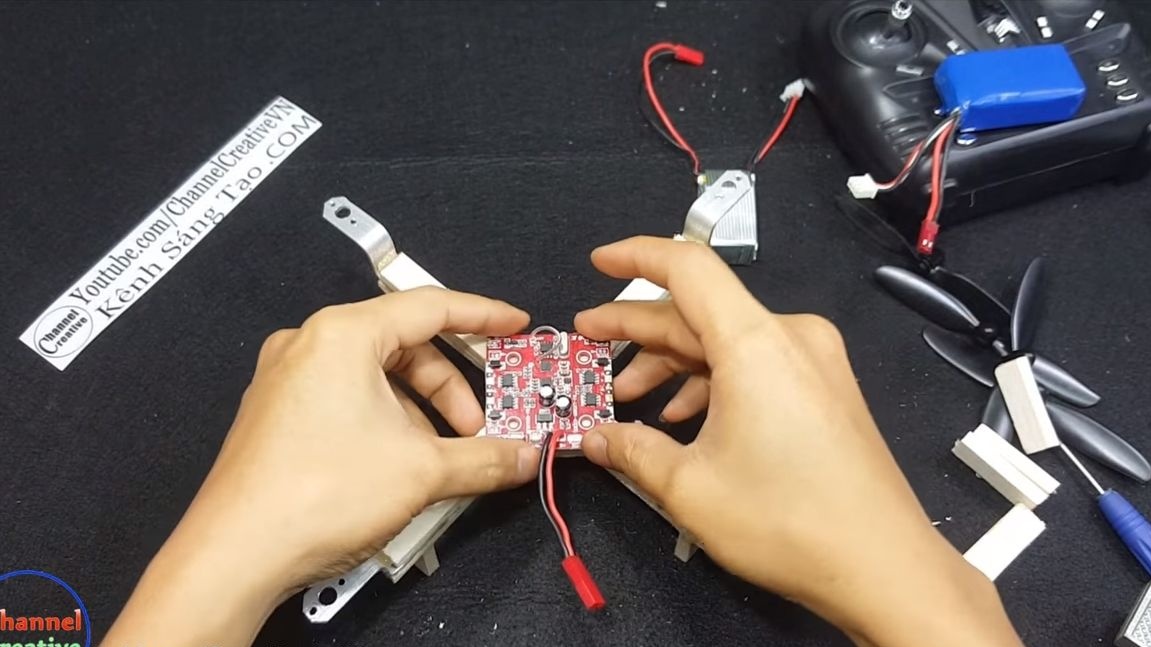
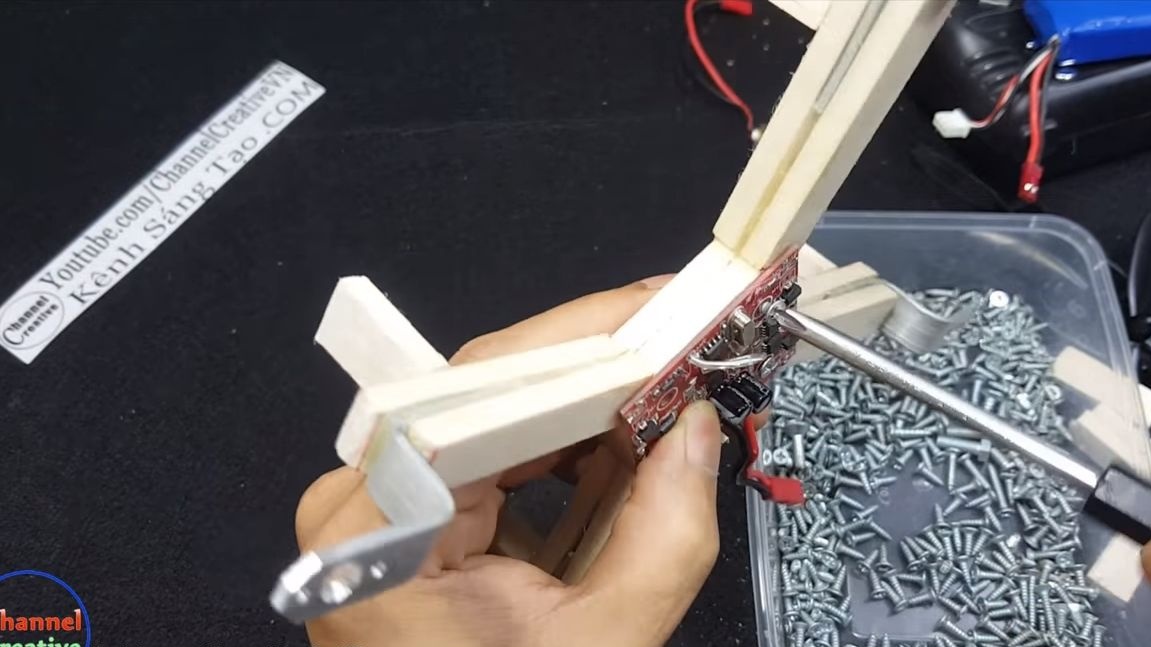
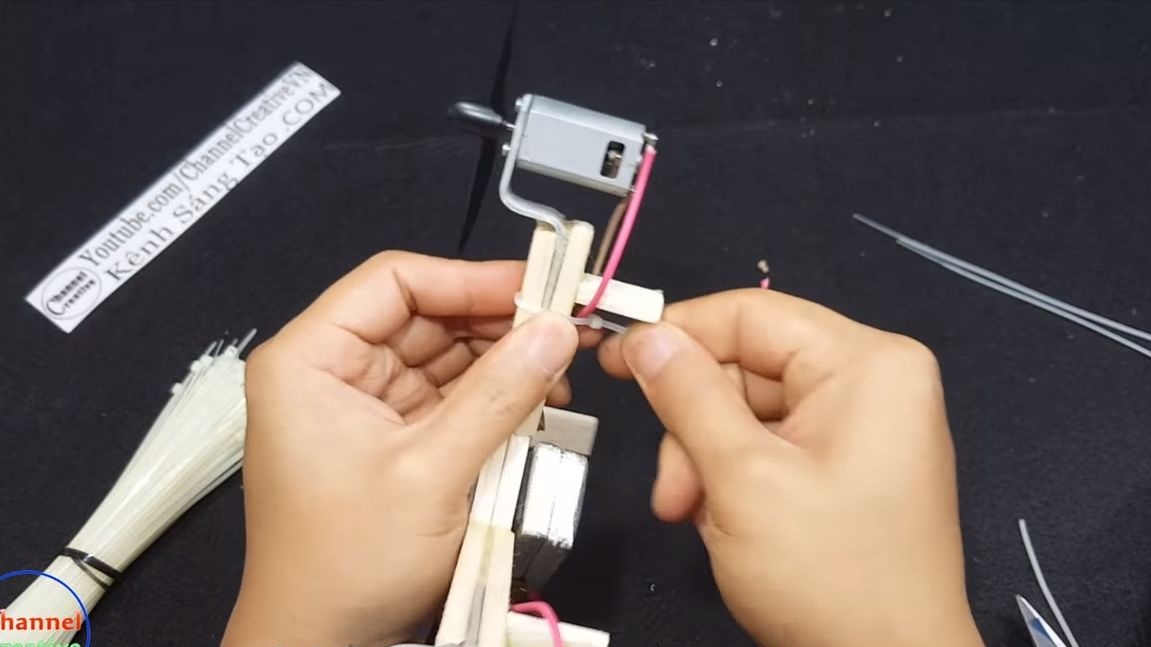
ขั้นตอนที่หก เราติดตั้งและเชื่อมต่อเครื่องยนต์
ยึดมอเตอร์เข้ากับวงเล็บด้วยสกรู ตอนนี้ช่วงเวลาที่สำคัญที่สุดมาแล้ว - เชื่อมต่อเครื่องยนต์กับคอนโทรลเลอร์ โดยรวมแล้วมี 8 เอาท์พุทบนตัวควบคุมนั่นคือสำหรับแต่ละมอเตอร์มีสองหน้าสัมผัสแยกกัน บัดกรีสายไฟเข้ากับบอร์ดและมอเตอร์โดยสังเกตขั้ว คุณสามารถดูแผนภาพการเชื่อมต่อในรายละเอียดเพิ่มเติมในภาพ
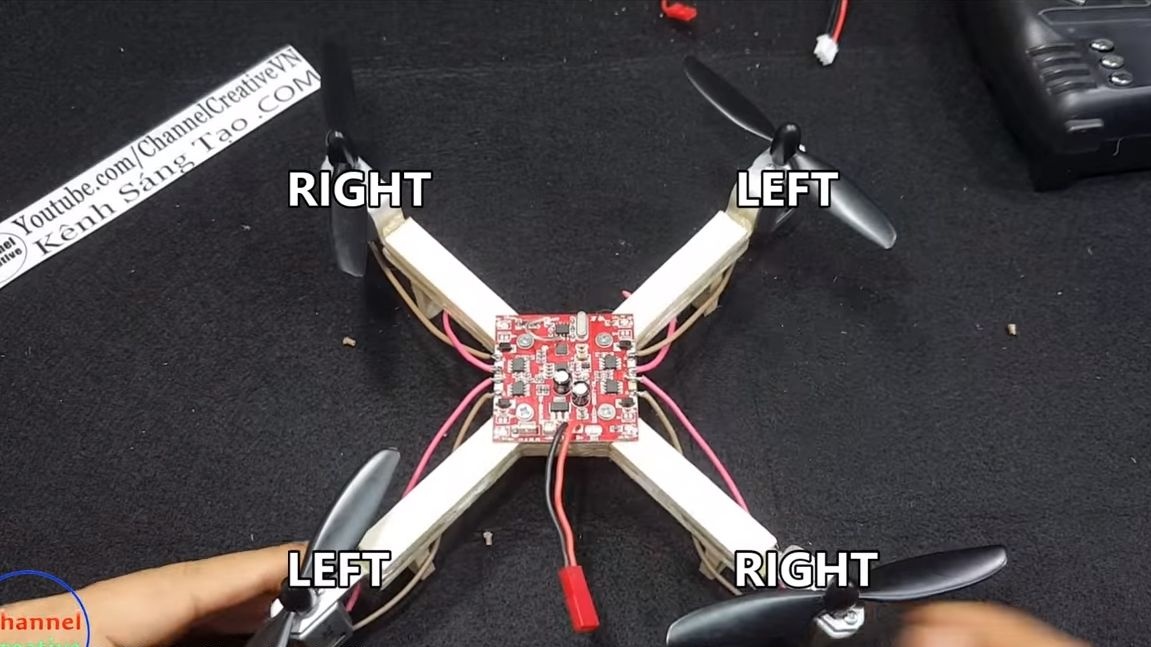
ตอนนี้มันยังคงติดตั้งใบพัดบนเพลามอเตอร์ เรามีทั้งขวาและซ้ายและจำเป็นต้องติดตั้งแบบทแยงมุม นั่นคือด้านขวาตรงข้ามด้านขวาและซ้ายตรงข้ามด้านซ้ายตามแนวทแยงมุมข้ามเฟรม สิ่งนี้จะหลีกเลี่ยงผลกระทบจากการหมุนของรูปสี่เหลี่ยมรอบแกน

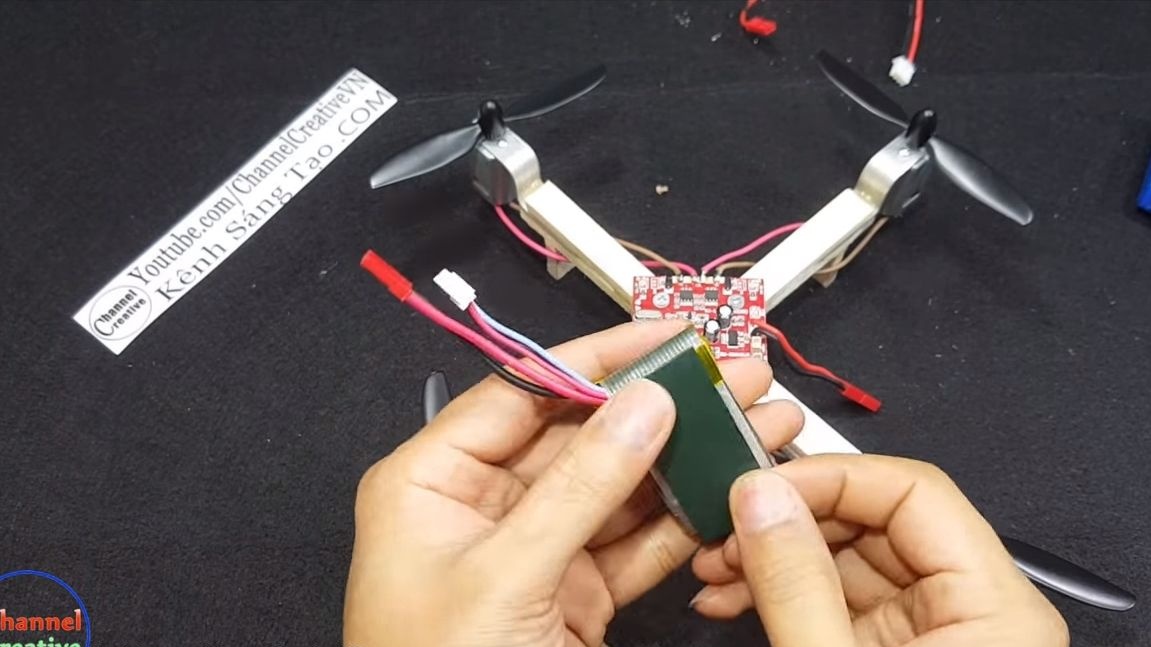
ขั้นตอนที่เจ็ด ขั้นตอนสุดท้ายของการชุมนุม
quadrocopter นั้นเกือบจะพร้อมแล้ว คุณจะต้องติดตั้งแบตเตอรี่อาจมีหลายอย่างขึ้นอยู่กับพลังงานและความต้องการของอุปกรณ์ ผู้เขียนใช้แบตเตอรี่สองก้อนที่มีแรงดันไฟฟ้า 7.4 โวลต์ความจุของมันยังคงเป็นปริศนา ก่อนเชื่อมต่อแบตเตอรี่เข้าด้วยกันพวกเขาสามารถห่อด้วยเทปหรือติดกาวด้วยเทปกาวสองหน้า จากนั้นนำเทปกาวสองหน้าและกาวแบตเตอรี่ไปที่ฐานของรูปสี่เหลี่ยม นี่ควรจะเพียงพอที่จะซ่อมแบตเตอรี่
คุณจะต้องผูกพลาสติก ใช้พวกเขาแก้ไขสายไฟที่ไปยังเครื่องยนต์เพื่อให้ไม่มีสิ่งใดแขวนอยู่ที่ใด หากสายไฟหยุดทำงานเมื่อเวลาผ่านไปพวกเขาจะหลุดออกจากจุดเชื่อมต่อ
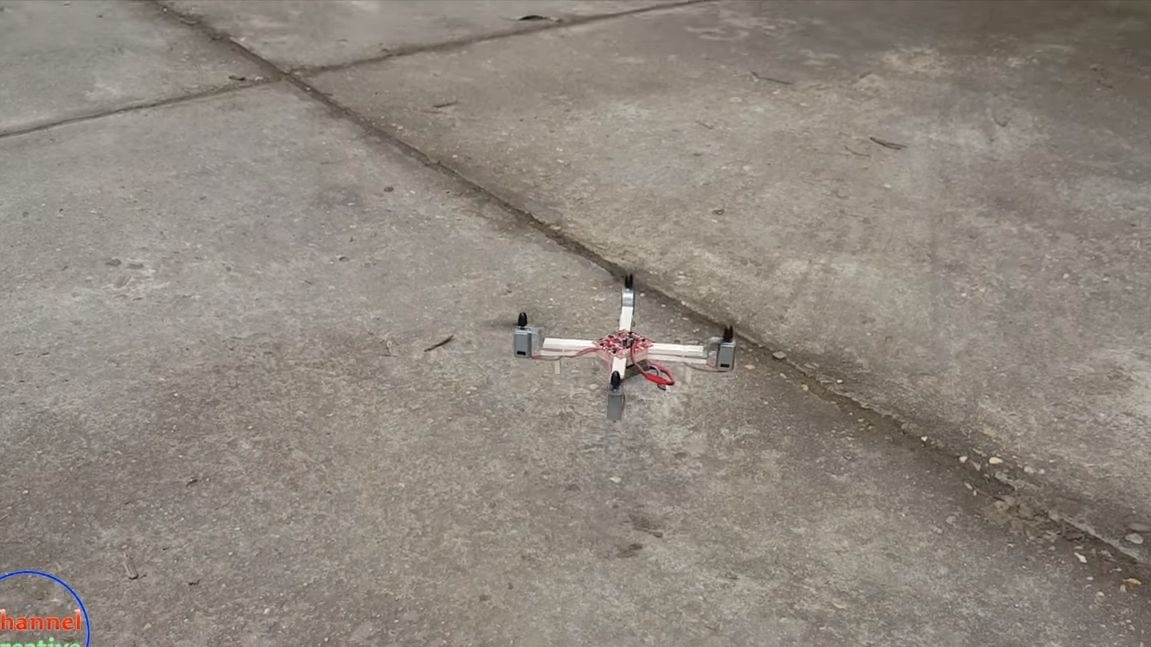
ที่ Quadrocopters การผลิตนี้ได้รับการพิจารณาแล้วเสร็จ คุณสามารถดำเนินการทดสอบได้ แต่อย่าลืมชาร์จแบตเตอรี่ให้ดีก่อนที่ผู้เขียน Quadrocopter บินค่อนข้างเร็วในวิดีโอและถูกควบคุมอย่างสมบูรณ์แบบ และทั้งหมดนี้แม้จะขาดอุปกรณ์อิเล็กทรอนิกส์ที่ทันสมัยในการควบคุม แน่นอนอุปกรณ์ไม่แรงและเบาพอจึงไม่แนะนำให้ทดสอบในสภาพอากาศที่มีลมแรง ขอให้โชคดีและเป็นแรงบันดาลใจในการทำผลิตภัณฑ์โฮมเมด!