


BBC Eight คือใครหรืออะไร BBC Eight เป็นตัวละครในตำนานของ Star Wars BBC Eight ปรากฏตัวครั้งแรกในตอนที่ VII: The Force Awakens ต่อมาหุ่นยนต์รุ่นปรากฏในการขาย หุ่นยนต์ การเคลื่อนไหว หุ่นยนต์ถูกควบคุมโดยใช้สมาร์ทโฟนหรือจอยสติ๊ก คุณลักษณะที่น่าสนใจของหุ่นยนต์คือหัวของมัน หัวของหุ่นยนต์นั้นผสมกันทั่วร่างกายและดูตลกดี ใน Ali BBC, แปดค่าใช้จ่ายจาก 1,500 p อาจารย์ของเราตัดสินใจสร้าง BBC แปดตัวเอง
เครื่องมือและวัสดุ:
- แบตเตอรี่ AA-4pcs;
- ช่องใส่แบตเตอรี่ AA;
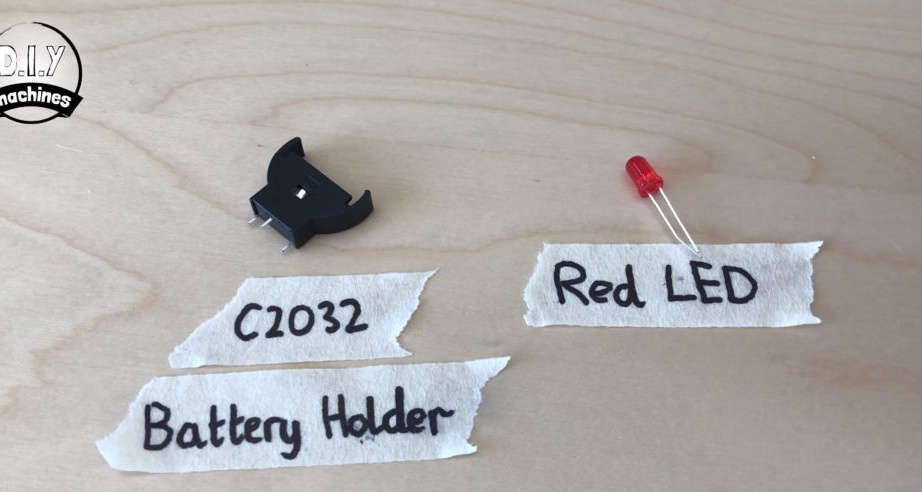
- แบตเตอรี่ CR2032;
- ช่องใส่แบตเตอรี่ CR2032;
- สีอโรโซล
-Markery;
เครื่องพิมพ์ 3D;
seeing-;
- เหล็กหล่อ
- สายผูก
- ปืนสีฟ้า;
- เครื่องตัดโฟม
- ไฟ LED สีแดง;
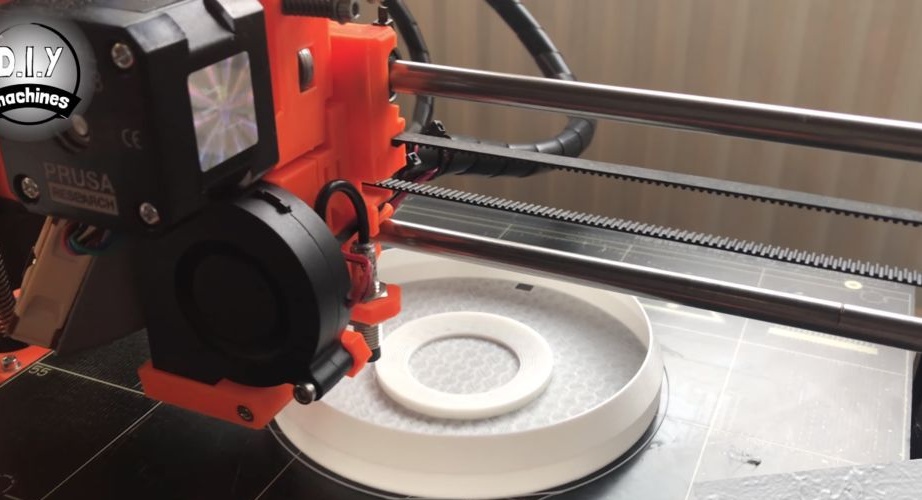
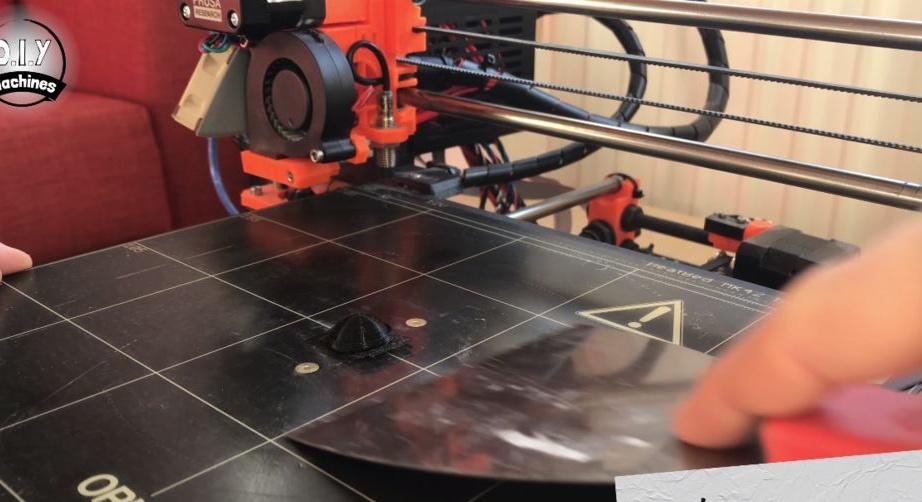
ขั้นตอนที่หนึ่ง: การพิมพ์ 3 มิติบนซีกโลก
ก่อนอื่นอาจารย์จะพิมพ์สองซีกโลกบนเครื่องพิมพ์ 3D สามารถดาวน์โหลดไฟล์ได้และยังมีไฟล์สองไฟล์ที่แนบมาด้านล่าง
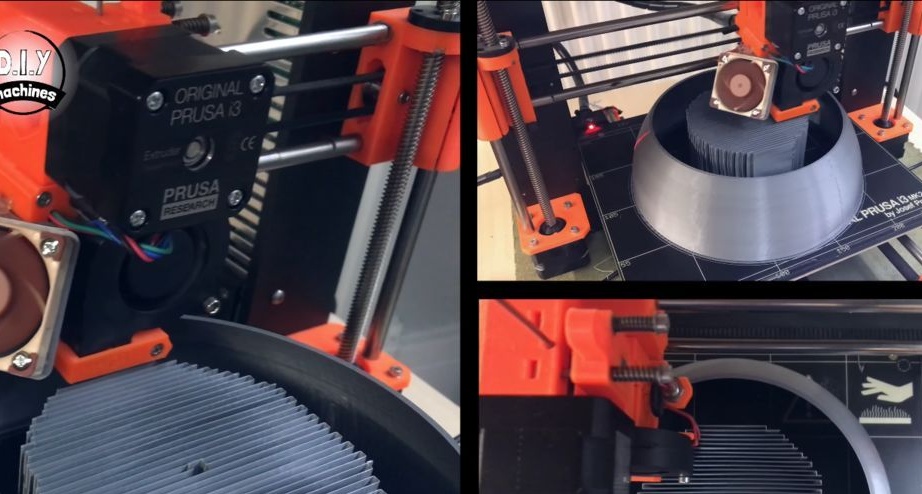


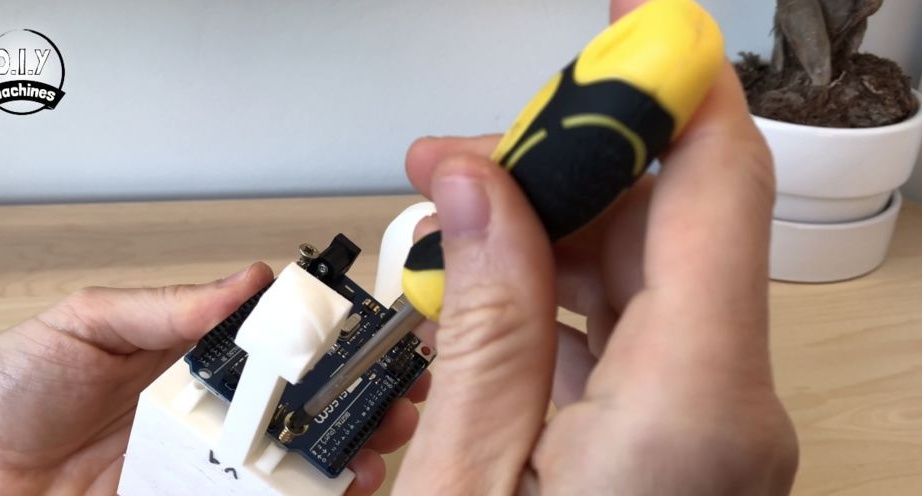
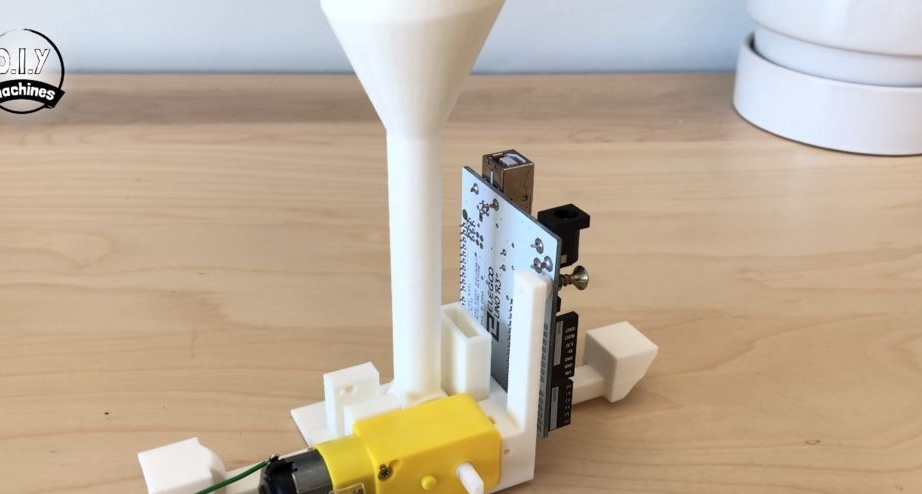
ขั้นตอนที่สอง: 3D Printing Chassis
พิมพ์แชสซี จากนั้นติดตั้งกับโครงเครื่อง Arduino Uno ลิงก์ไปยังไฟล์ด้านล่าง
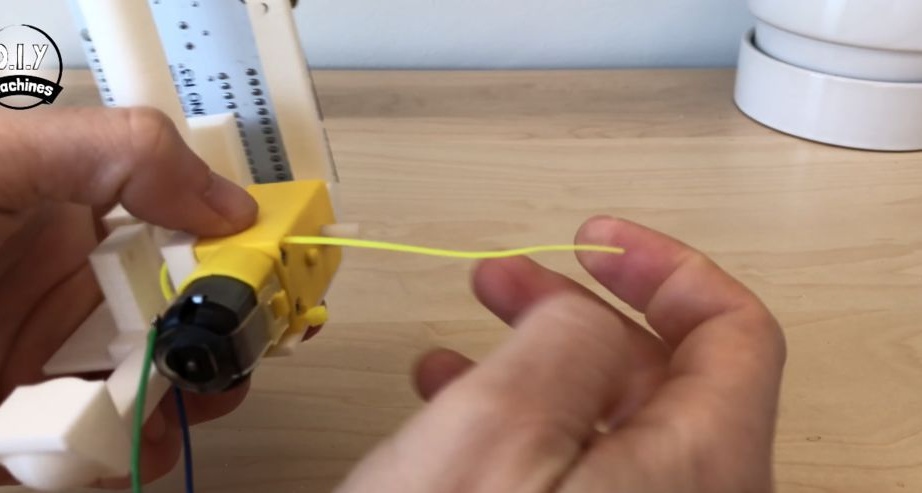
ขั้นตอนที่สาม: มอเตอร์เกียร์
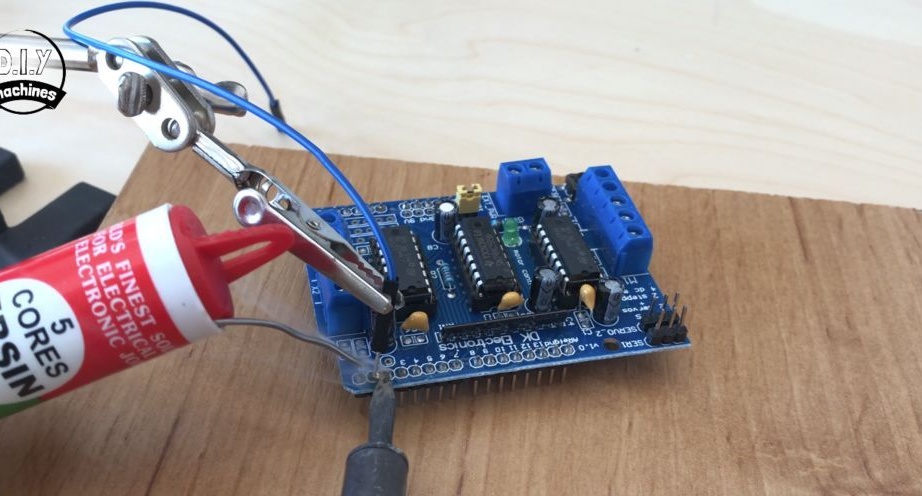
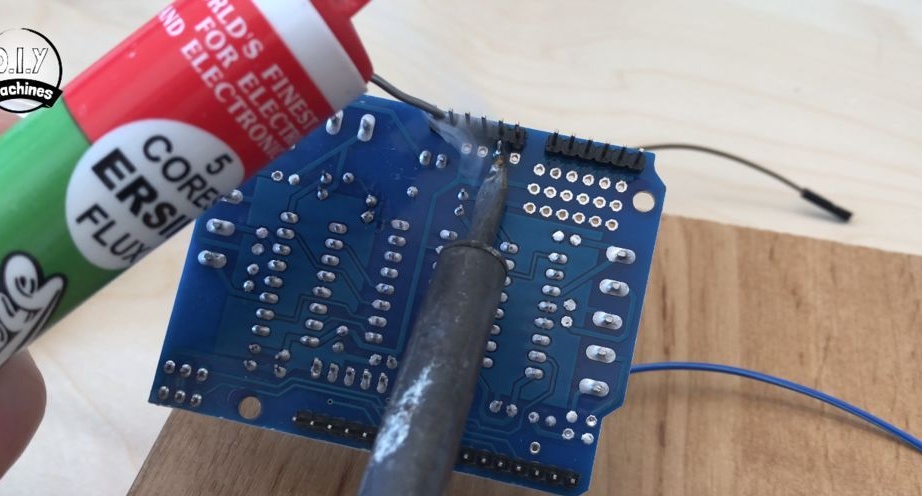
ทหารไปยังที่ติดต่อของสายมอเตอร์เกียร์ ติดตั้งมอเตอร์เกียร์บนตัวเครื่อง
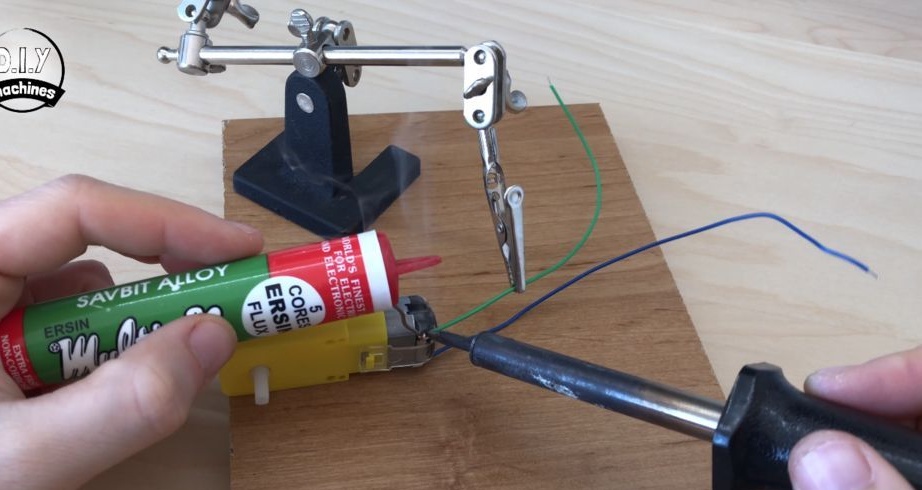
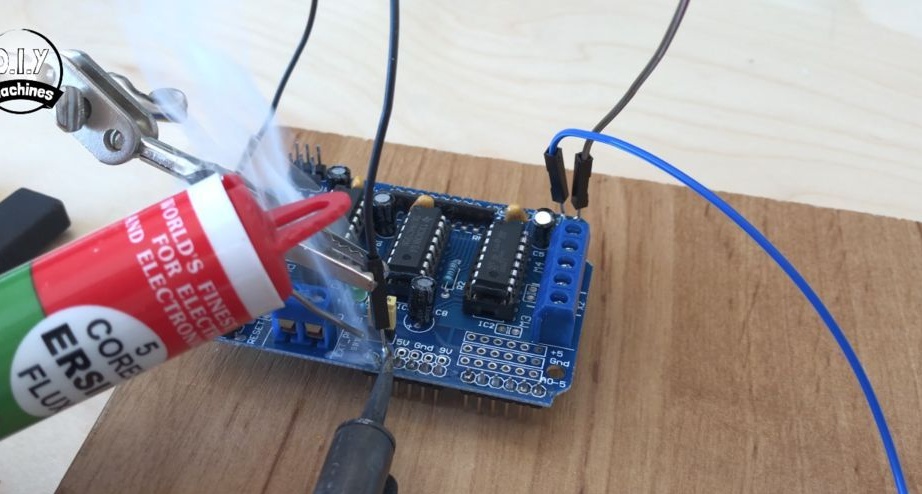
ขั้นตอนที่สี่: ไดรเวอร์เครื่องยนต์
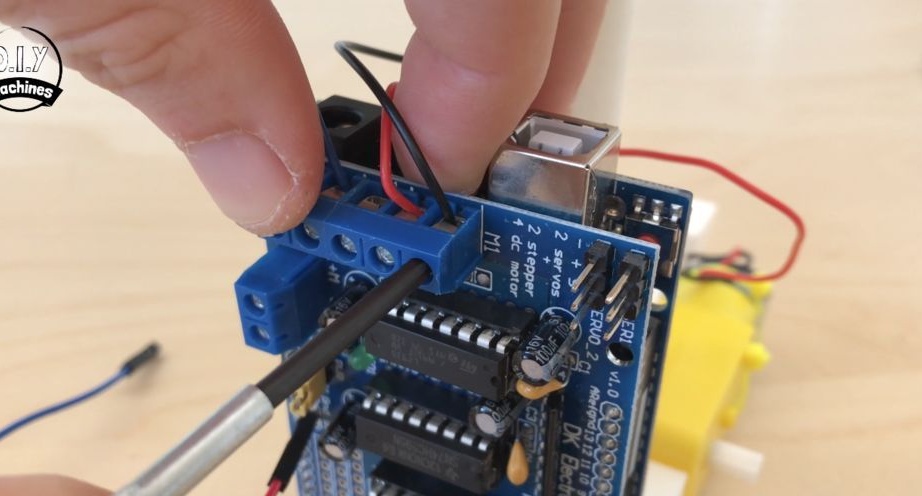
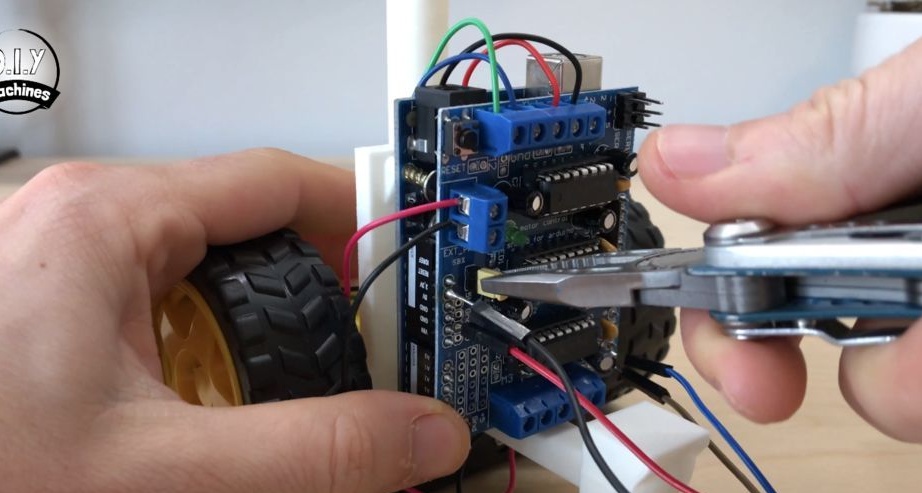
บัดกรีสายไฟเข้ากับหน้าสัมผัสของไดรเวอร์ เพื่อให้การนำทางสายไฟดีขึ้นมีหลายสี สีฟ้า 1; สีดำ 3.3; สีน้ำตาล 0; สีแดง-GND (พื้นดิน)
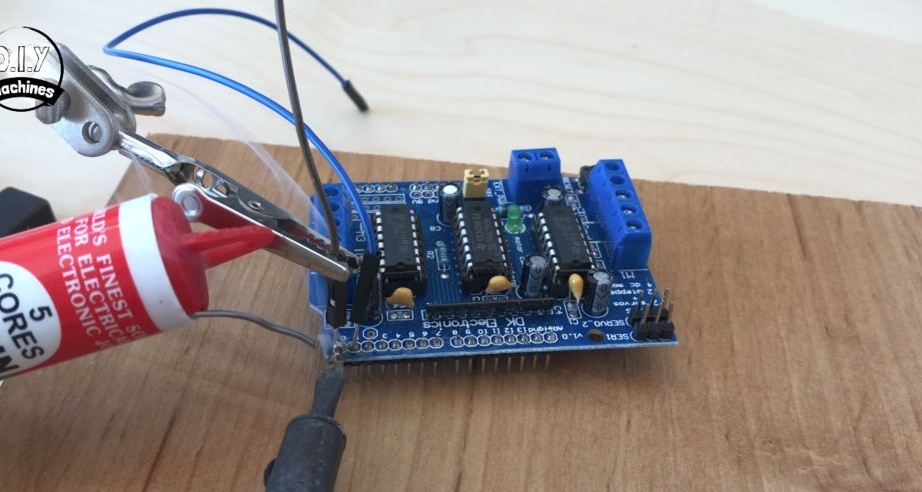
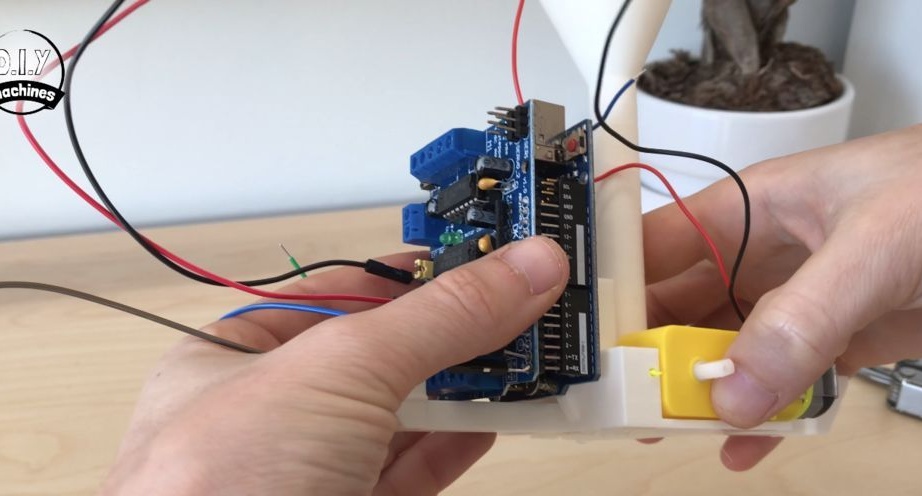
ติดตั้งไดรเวอร์ใน Arduinka
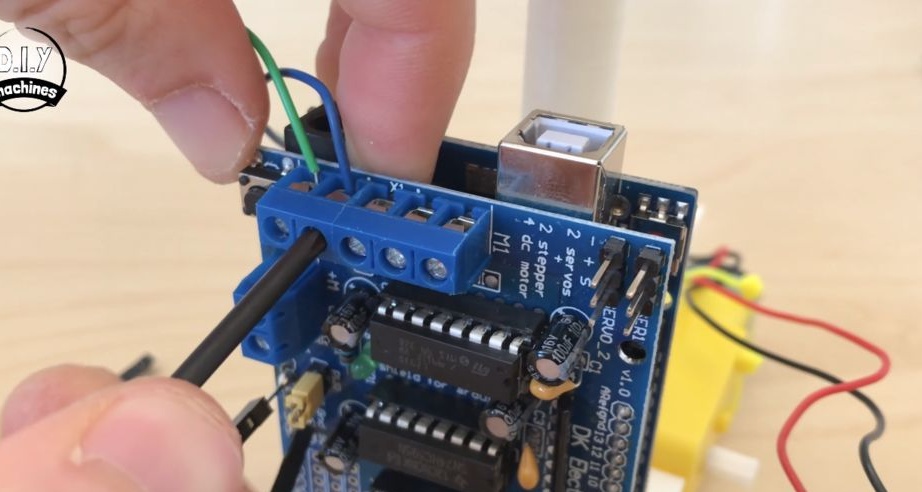
เชื่อมต่อเครื่องยนต์กับไดรเวอร์ เราดูรูปเครื่องยนต์ M1 ตัวแรก M2 ตัวที่สอง
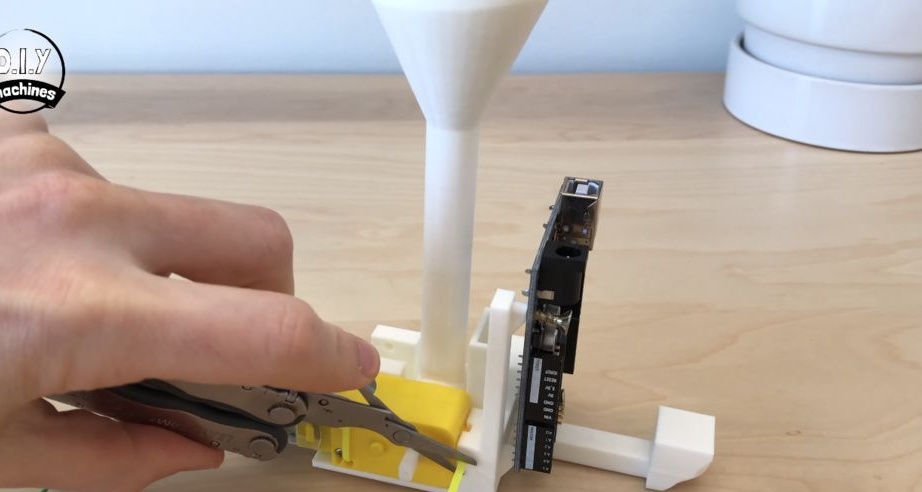
ขั้นตอนที่ห้า: พาวเวอร์ซัพพลาย
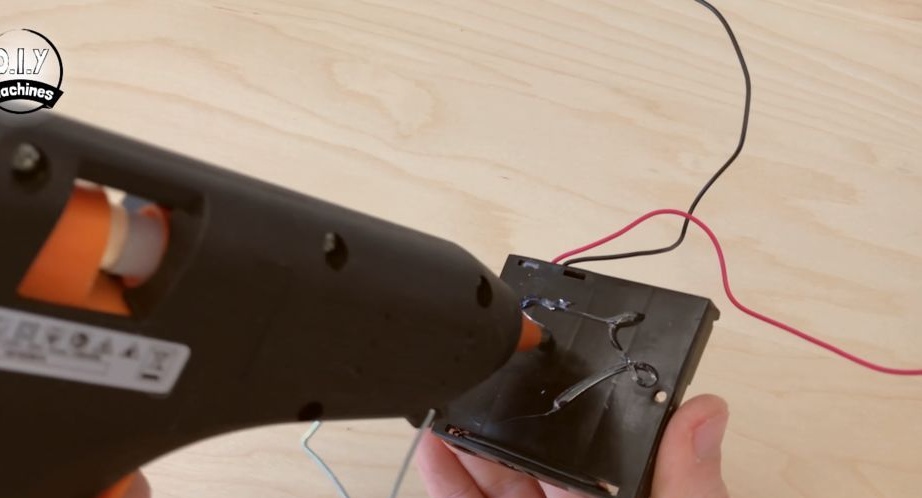
กาวช่องใส่แบตเตอรี่เข้ากับตัวเครื่อง เชื่อมต่อสายไฟเข้ากับไดรเวอร์ (ดูรูปสุดท้าย)

ขั้นตอนที่หก: ล้อ
ชุดล้อ

ขั้นตอนที่เจ็ด: ดาวน์โหลดรหัส
นำจัมเปอร์ออกชั่วคราว
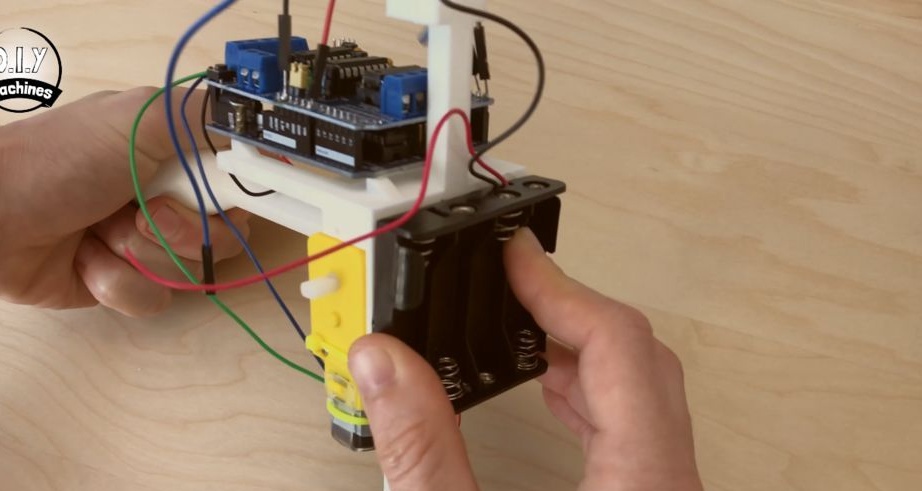
จากนั้นจะใส่แบตเตอรี่ลงในตัวยึดและเชื่อมต่อ Arduinka กับคอมพิวเตอร์
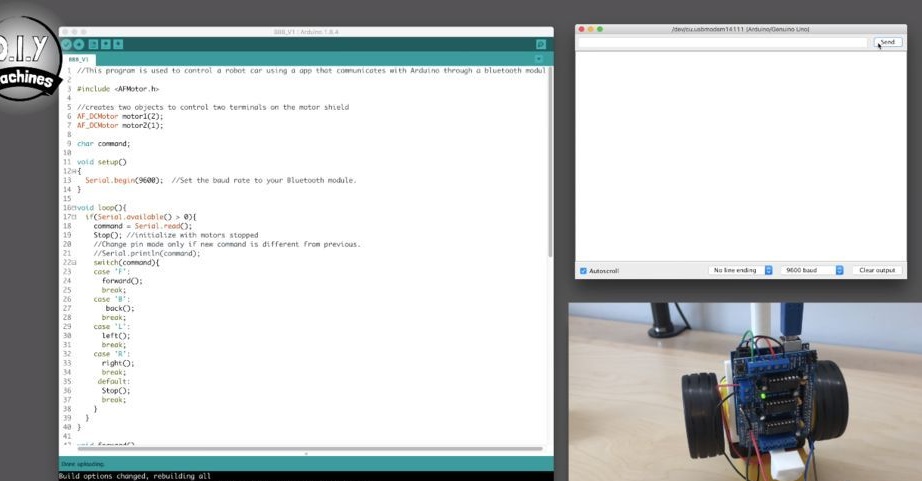
หลังจากโหลดคุณสามารถตรวจสอบการทำงานของคำสั่ง
F - ขอให้เขาเดินหน้าต่อไป
B - สั่งให้เขากลับมา
L - ไปทางซ้าย
R ถูกต้อง
S-หยุด
หากล้อหมุนไปในทิศทางตรงกันข้ามระหว่างคำสั่งไปข้างหน้ารหัสสามารถเปลี่ยนได้ ในบรรทัดที่ 45 เราเปลี่ยนคำว่า "BACKWARD" เป็น "FORWARD" ในบรรทัด 53 "FORWARD" เป็น "BACKWARD" จากนั้นเราโหลดรหัสอีกครั้งและตรวจสอบ
หากทุกอย่างถูกต้องให้ถอดสายเคเบิลและใส่จัมเปอร์เข้าที่
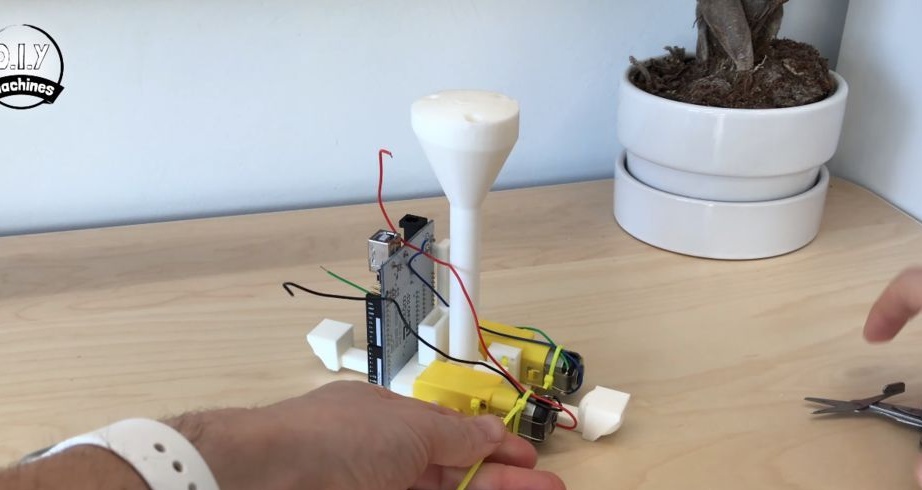
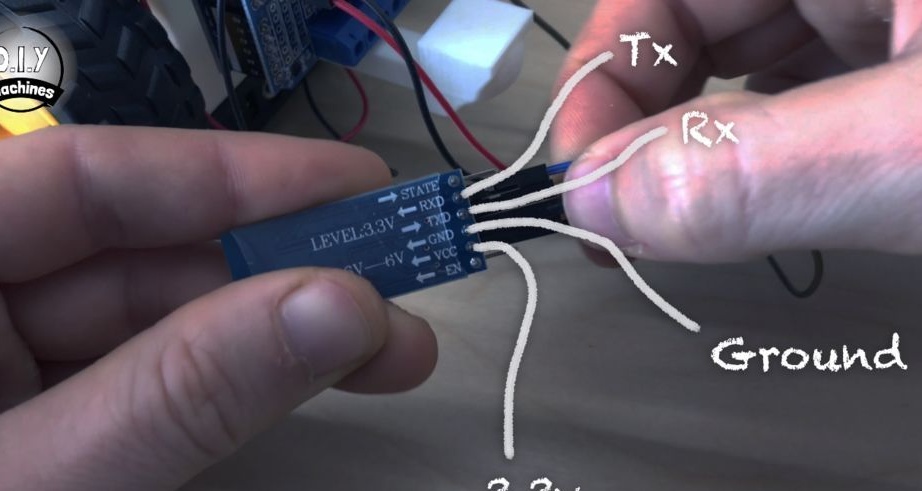
ขั้นตอนที่แปด: โมดูลบลูทู ธ
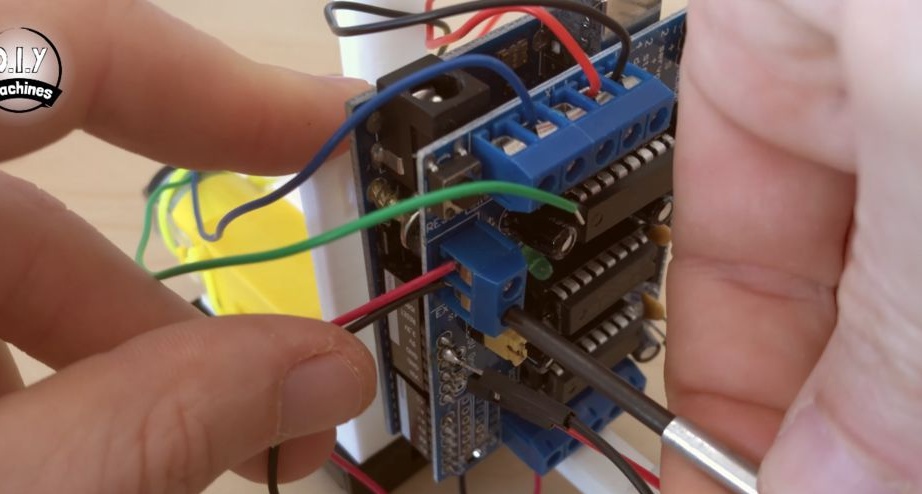
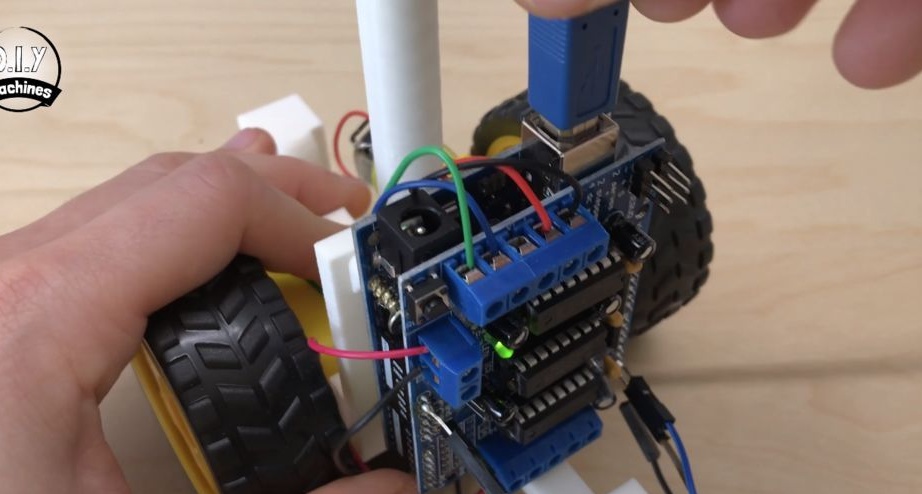
จากนั้นเชื่อมต่อโมดูลบลูทู ธ เขาดูที่ pinout ของไดรเวอร์และเชื่อมต่อ ลวดเป็นสีฟ้า (1 / RX) ถึงโมดูล TX, สีดำ (3.3) ถึง VCC, สีน้ำตาล (0 / Tx) ถึง RXD, สีแดง GND ถึง GND โมดูล หากทุกอย่างเชื่อมต่ออย่างถูกต้อง LED ควรสว่างขึ้น
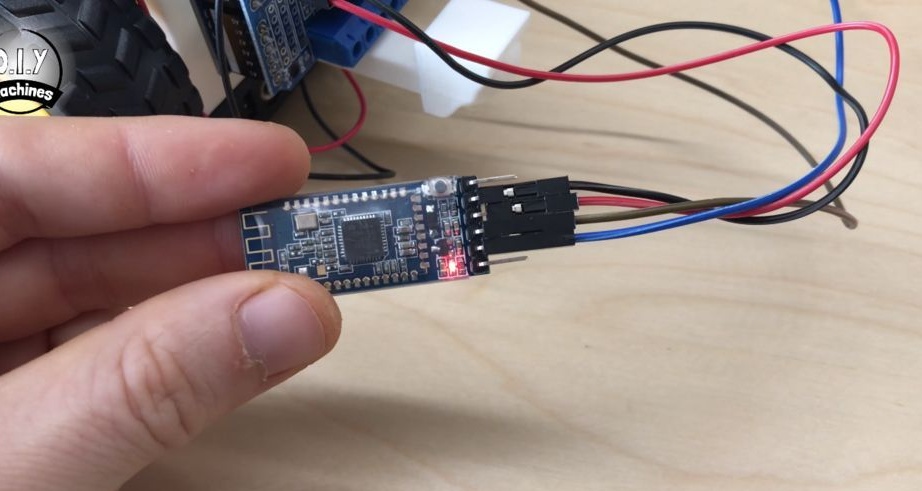
ติดตั้งโมดูลบนแชสซี
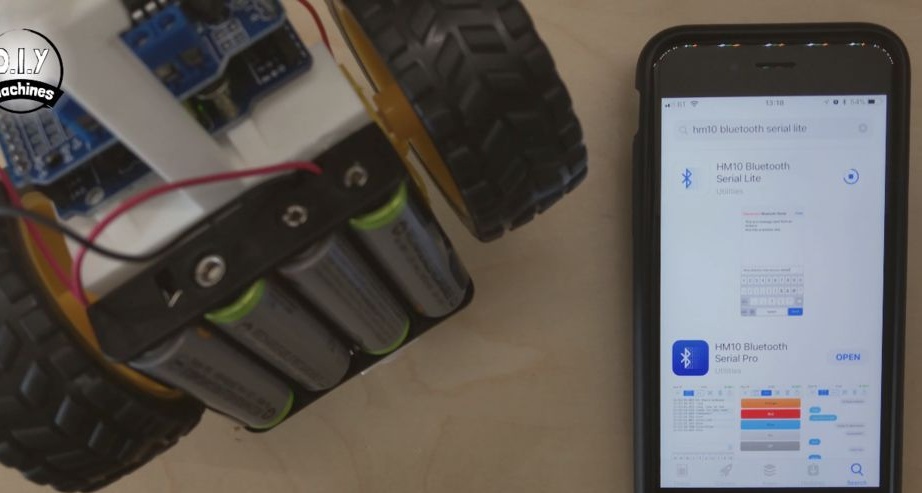
ต่อไปคุณจะต้องเชื่อมต่อกับโมดูล เนื่องจากต้นแบบมีสมาร์ทโฟนแอปเปิ้ลเขาจึงใช้โปรแกรม "HM10 Bluetooth Serial Pro" จากร้าน Apple สำหรับ Android ใน Play Market มีโปรแกรมมากมาย มันจะตรวจสอบการทำงานโดยการส่งคำสั่ง 'F', 'B', 'L', 'R' และ 'S' คุณยังสามารถใช้จอยสติกเสมือน

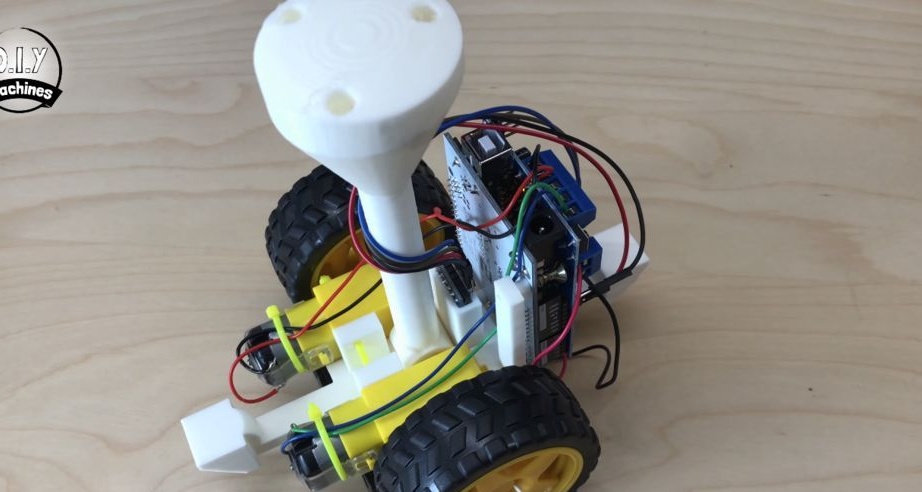
ขั้นตอนที่เก้า: ทดสอบ
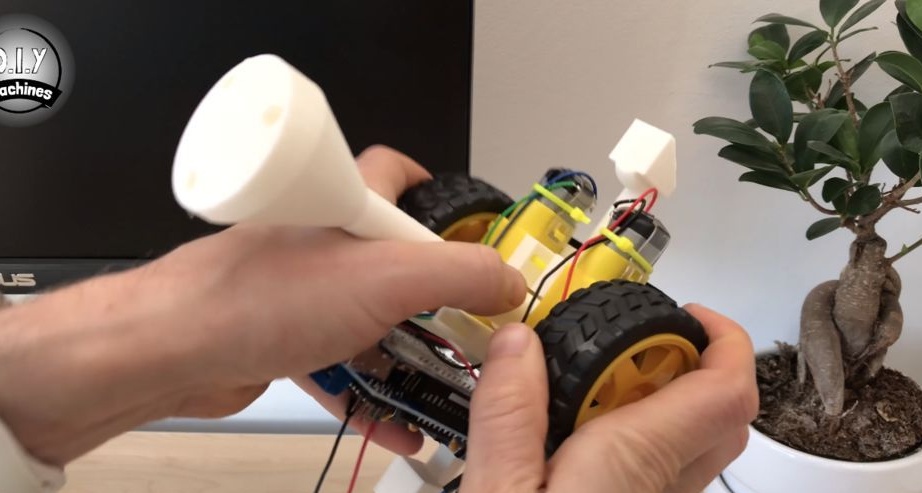
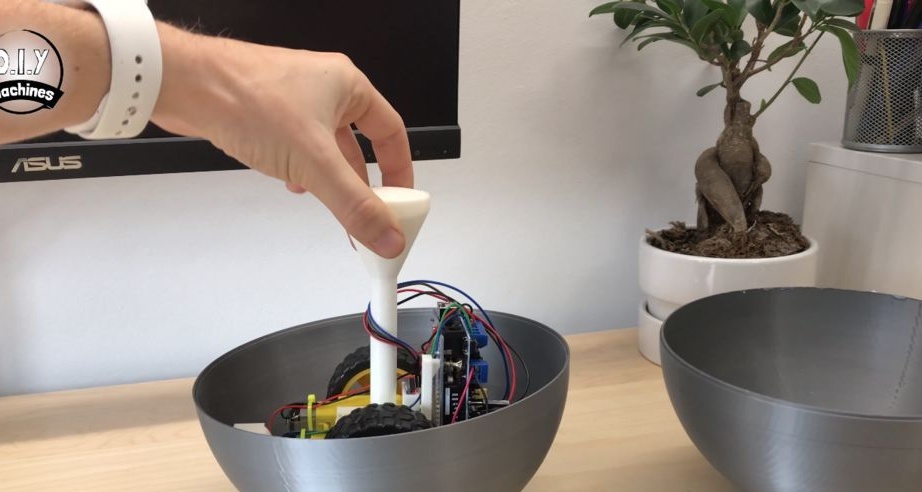
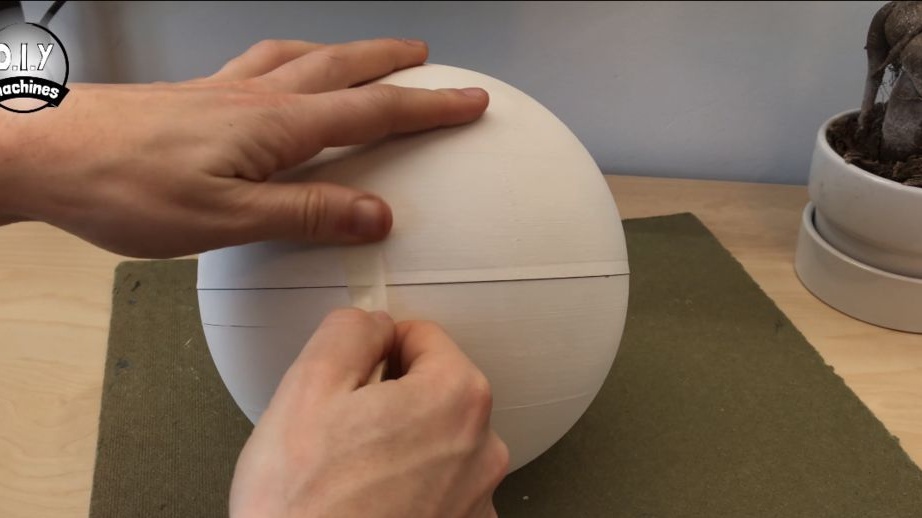
ติดตั้งแชสซีในซีกโลก ปิดครึ่งหลัง ที่ทางแยกให้ม้วนด้วยเทป ตอนนี้คุณสามารถตรวจสอบว่าหุ่นยนต์เคลื่อนที่อย่างไร

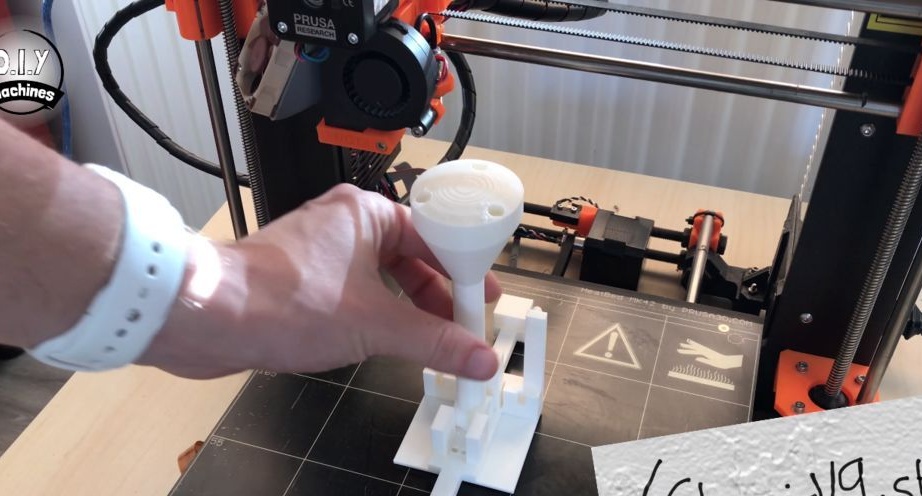
ขั้นตอนที่สิบ: หัวหน้าฐาน
บนเครื่องพิมพ์ 3D พิมพ์ชิ้นส่วนสำหรับหัวหุ่นยนต์ คุณสามารถดาวน์โหลดได้ด้านล่าง
Step Eleven: แม่เหล็ก
ถอดชิ้นส่วนร่างกายและติดกาวแม่เหล็กกับชุดล้อ สิ่งสำคัญคือแม่เหล็กจะต้องมองด้วยขั้วเดียวกัน
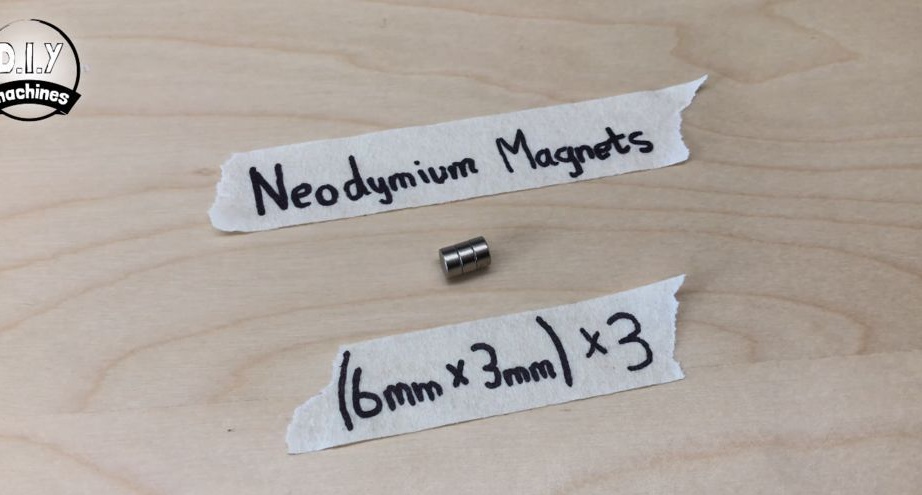
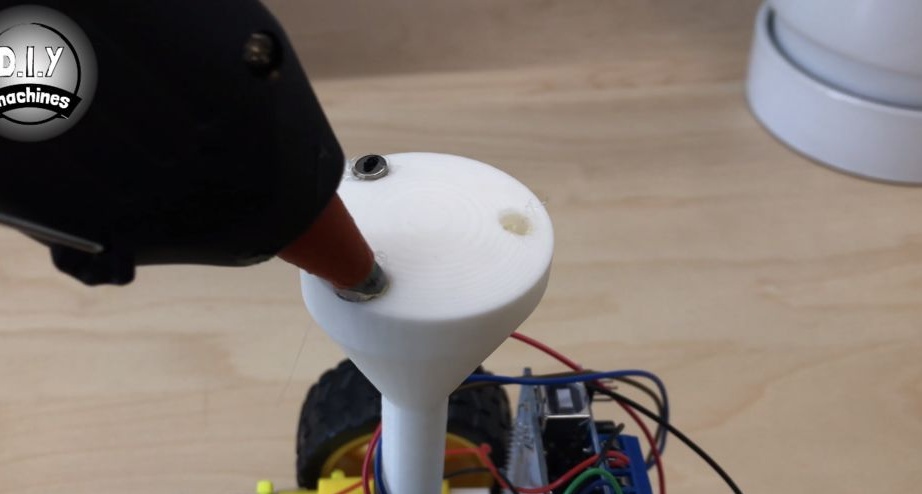
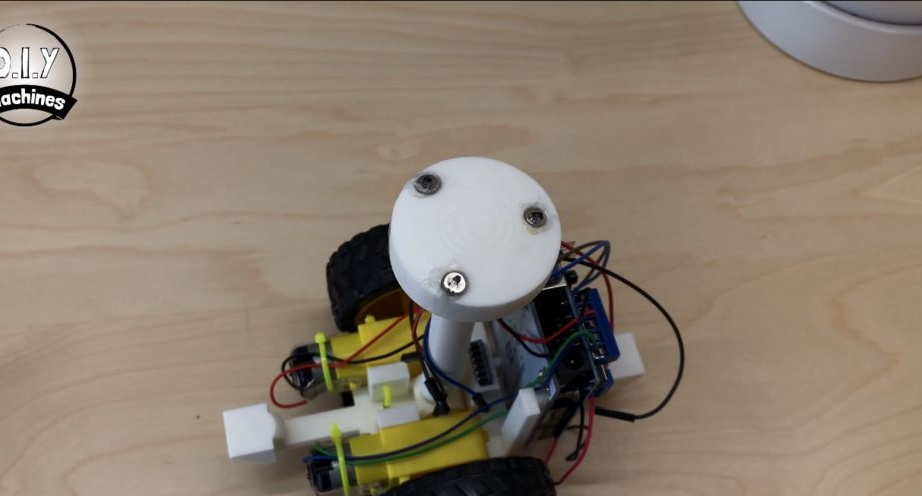
สะสมร่างของหุ่นอีกครั้ง วางผ้าเช็ดปากสองผืนที่ส่วนบนของร่างกาย แม่เหล็กสามอันถูกทำให้ติดอยู่บนผ้าเช็ดปาก ใช้กาวร้อนละลายกับแม่เหล็กและยึดติดกับฐานของหัว จากนั้นพลิกและนำกระดาษออก





ขั้นตอนที่สิบสอง: หัวหน้า Droid
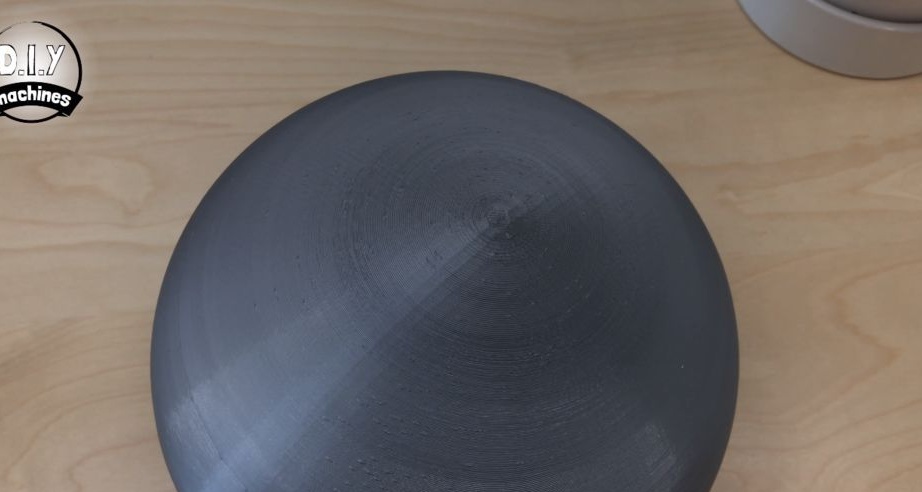
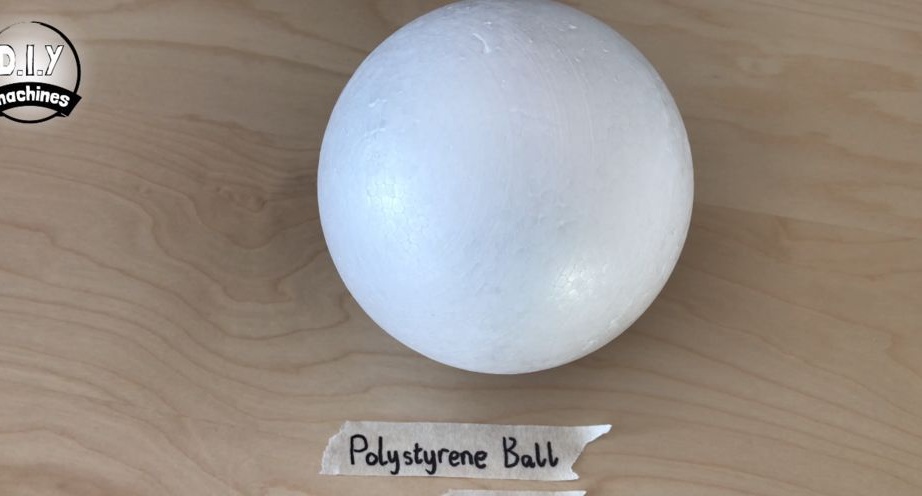
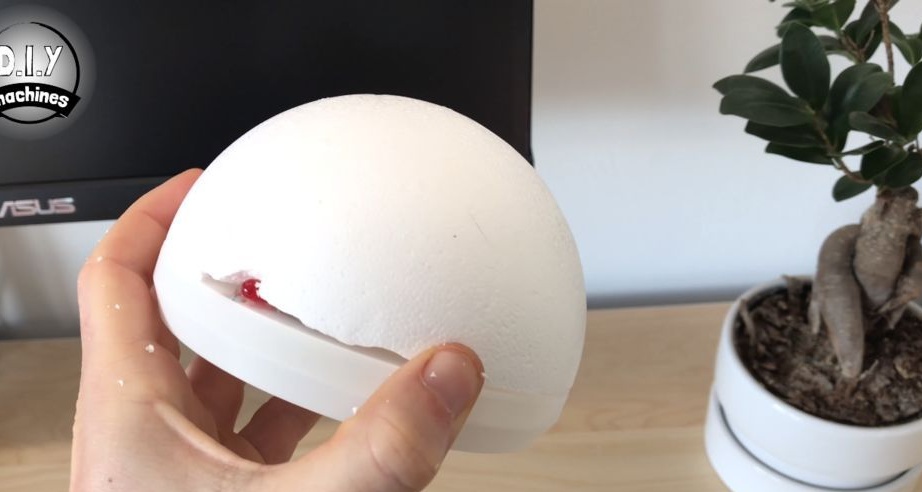
เครื่องตัดโฟมตัดบอลสไตรีน


ไฟ LED สีแดงจะติดกับหน้าสัมผัสของช่องใส่แบตเตอรี่ มันโค้งและแทรกเข้าไปในรูของฐาน ติดกาวช่องด้วยกาวร้อนละลาย



จากนั้นกาวร้อนจะเกาะติดที่ครึ่งเบสของลูกบอลที่ถูกตัด ก่อนอื่นคุณต้องทำการ cutout สำหรับ LED หลังจากกาวแข็งตัวแล้วจะประมวลผลข้อต่อด้วยกระดาษทราย




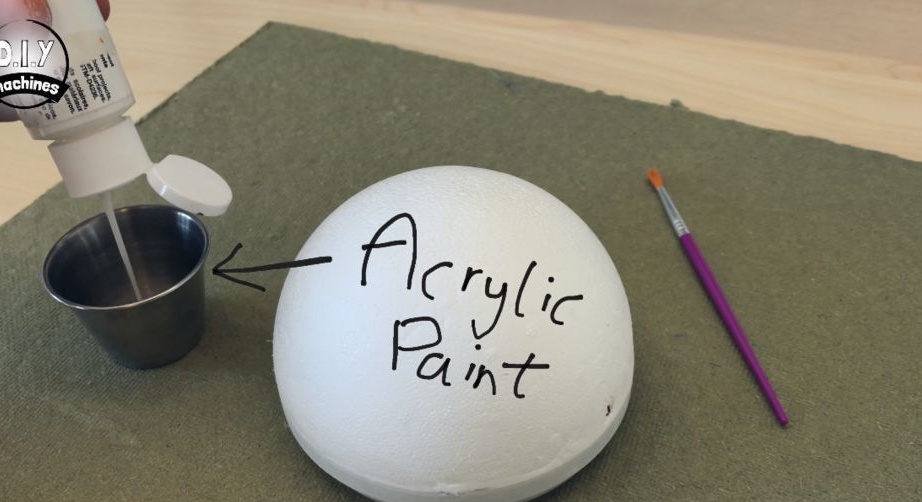
ขั้นตอนที่สิบสาม: การระบายสีหัว
ใช้สีอะครีลิคสีขาวสามชั้นกับพื้นผิวของหัว หลังจากการอบแห้งสีจะถูกนำไปใช้



ขั้นตอนที่สิบสี่: เสาอากาศ
ต้นแบบสร้างเสาอากาศจากที่จับแปรง ตัดชิ้นส่วนและทาสีด้วยสีดำ ต้นแบบเซ็นเซอร์และตาพิมพ์บนเครื่องพิมพ์ 3 มิติ ไฟล์ด้านล่าง
กาวเสาอากาศและเซ็นเซอร์




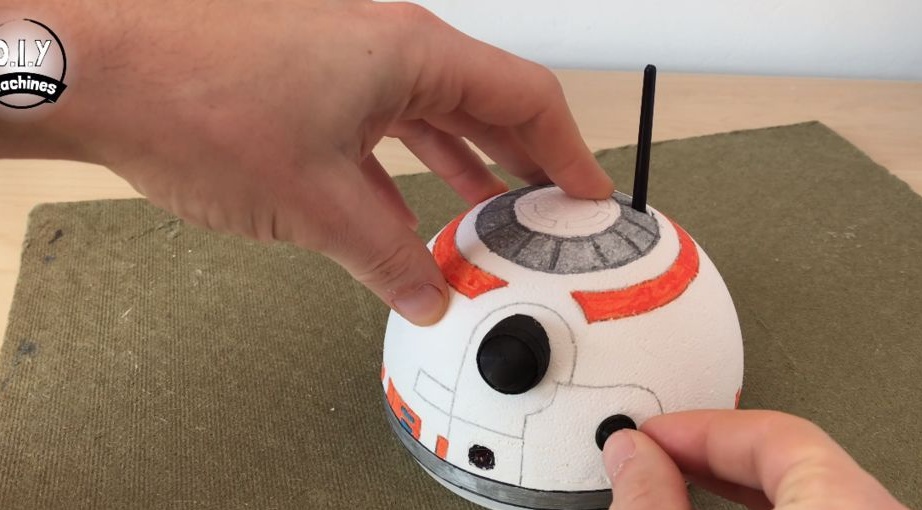
ขั้นตอนที่สิบห้า: การระบายสีร่างกาย
ตอนนี้ถึงเวลาที่จะไปที่เนื้อตัว ใช้สีรองพื้นสีขาวกับพื้นผิว หลังจากการอบแห้งมันวาดภาพ





BB-8 astroid droid พร้อมแล้ว ตอนนี้คุณต้องทำและไปข้างหน้าเพื่อที่จะเอาชนะจักรวาล

กระบวนการทั้งหมดของการทำหุ่นสามารถดูได้ในวิดีโอด้านล่าง
[media = http: // https: //youtu.be/x67xsED77lM]